

Dai un’occhiata ai nostri Corsi di Guida Sicura, ai nostri Tour in Moto e ai nostri Tour in Miata!
Premessa
Questo articolo è il seguito della Parte 1 – Sterzata e spostamento laterale del corpo, dove sono descritti i modi per far curvare la moto. Qui invece vedremo che cosa succede alle traiettorie quando si accelera e si frena in curva. Anche questa parte parte inizia con un capitolo in cui sono trattate le nozioni di dinamica della moto necessarie per comprendere i comportamenti descritti nel seguito.
Variazioni di velocità in curva
1 Dinamica
1.1 Trasferimenti di carico
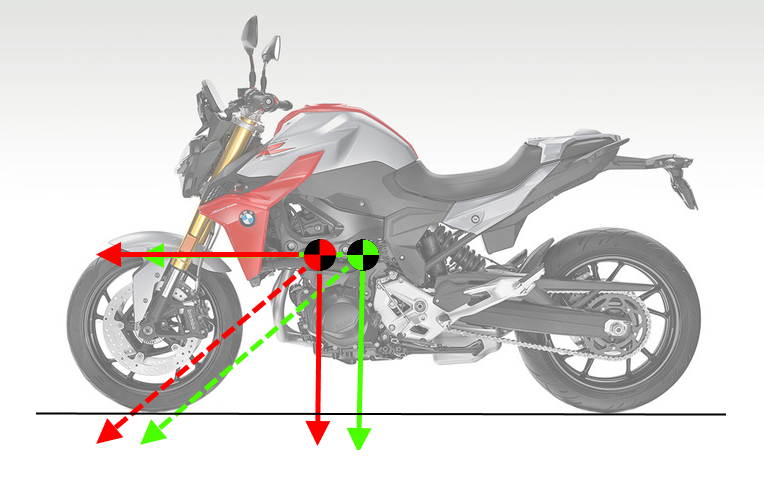
1.1.1 In accelerazione
In accelerazione, la forza impressa contro l’asfalto dalla ruota posteriore e l’inerzia applicata sul baricentro determinano un trasferimento di carico dalla ruota anteriore a quella posteriore, reso evidente dal fatto che la moto cabra, cioè solleva la parte anteriore e abbassa quella posteriore. Per chiarire meglio questo fatto, immaginate di appoggiare la moto su due bilance, una per ruota, e che a moto ferma entrambe le bilance segnino lo stesso peso. Se si potesse continuare a pesare la moto anche in accelerazione, accadrebbe che il peso, pur restando complessivamente uguale [1], si sposterebbe dalla ruota anteriore a quella posteriore all’aumentare dell’accelerazione.

- lo sterzo si alleggerisce
- l’angolo di sterzo e l’avancorsa aumentano, rendendo la moto meno maneggevole.
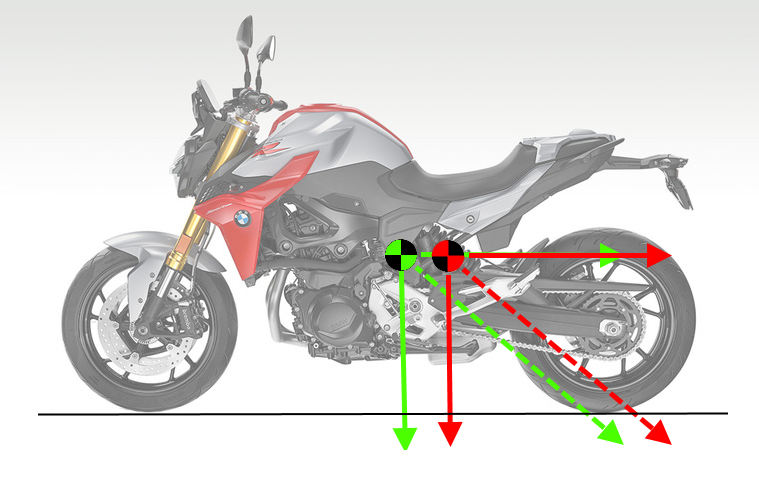
1.1.2 In frenata
In frenata la forza frenante impressa contro l’asfalto dalle due ruote determina un trasferimento di carico dalla ruota posteriore a quella anteriore, con la moto che picchia, cioè affonda la parte anteriore e solleva quella posteriore.

- la compressione della sospensione anteriore peggiora notevolmente l’assorbimento delle sconnessioni
- l’angolo di sterzo e l’avancorsa diminuiscono, rendendo la moto più maneggevole e favorendo l’inserimento in curva.
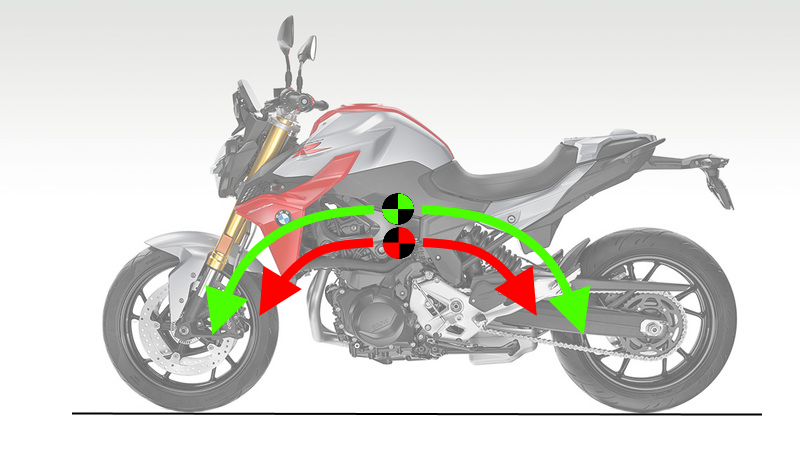
1.2 Deriva
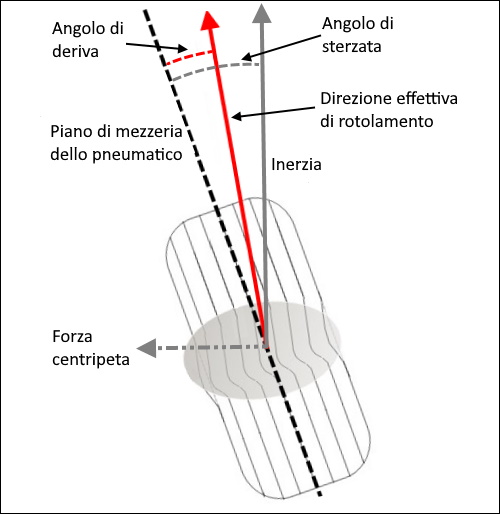
Quando si percorre una curva, il battistrada è deformato dalla forza centripeta generata dal contatto con l’asfalto, perciò la ruota percorre una traiettoria un po’ più larga rispetto a quella che dovrebbe essere se il battistrada fosse perfettamente rigido. Questo fenomeno si chiama deriva e l’angolo tra la traiettoria teorica – cioè la direzione del piano di mezzeria della ruota – e quella reale percorsa dalla ruota è detta angolo di deriva.
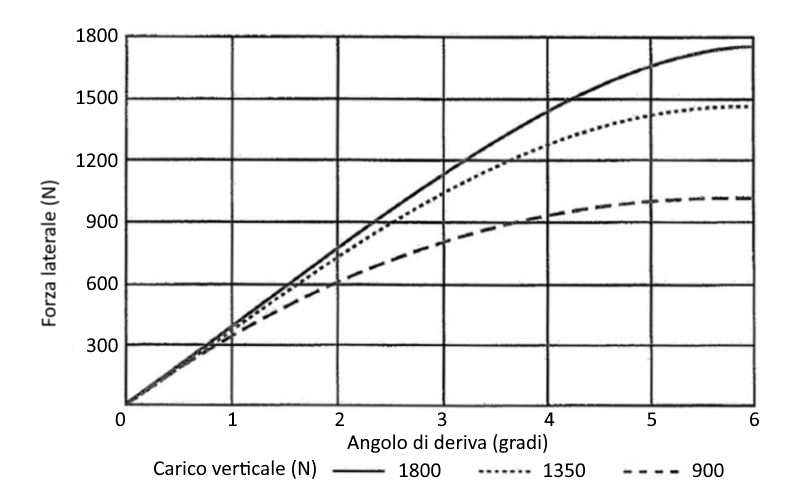
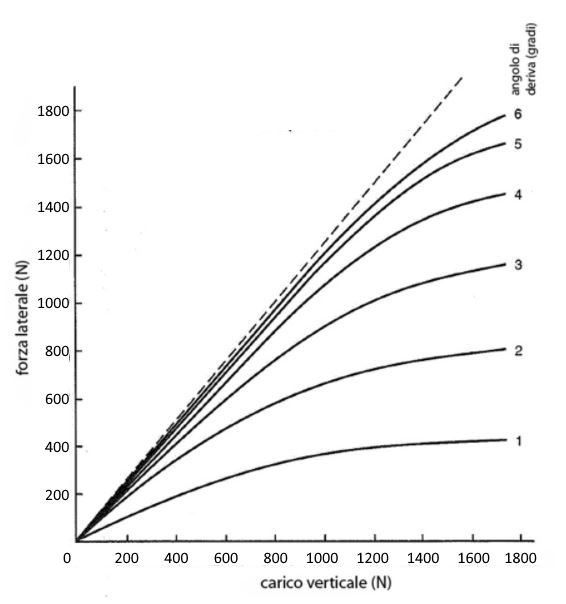
- all’aumentare delle forze laterali
- al diminuire del carico.
- maggiore è la velocità a parità di raggio della traiettoria, cioè maggiore è l’angolo di inclinazione del sistema moto + pilota, più la deriva aumenta (aumenta la forza laterale ma non il carico)
- più il carico si trasferisce dinamicamente su una ruota, più la sua deriva diminuisce (aumenta il carico, ma non la forza laterale)
- più si applica forza frenante o accelerante a una ruota, più la sua deriva aumenta (la forza è diretta longitudinalmente rispetto allo pneumatico, ma la sua componente trasversale dovuta alla traiettoria curva aumenta la forza laterale)
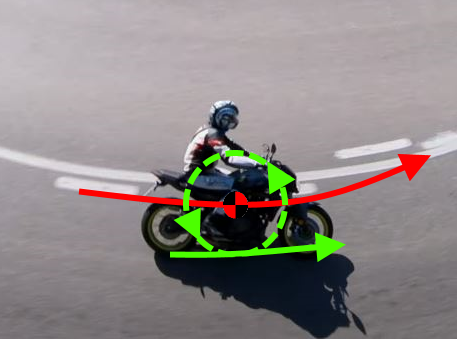
1.3 Momenti imbardanti dovuti alle variazioni di velocità
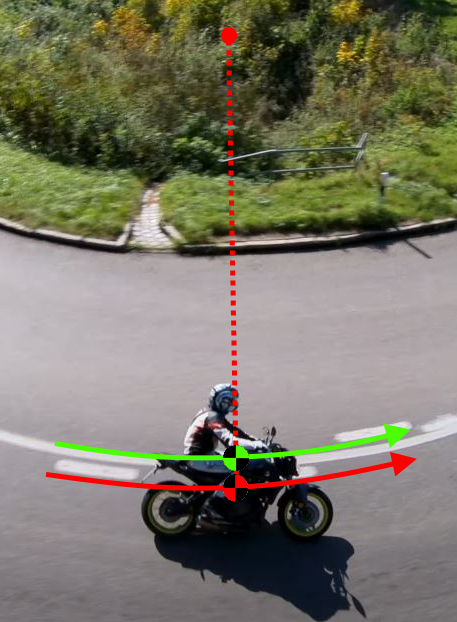
Come abbiamo visto nel paragrafo 1.5.2 della Parte 1 di questo articolo, durante la percorrenza della curva, le ruote percorrono una traiettoria più esterna rispetto a quella del baricentro. Per tale ragione, ogni variazione della velocità impressa alle ruote con il gas e i freni determina un momento imbardante che si somma o si sottrae a quello autoraddrizzante naturalmente presente in curva. In particolare:
- una decelerazione aumenta il momento imbardante ad allargare, cioè spinge la moto ad andare ancora più dritta.
- un’accelerazione aggiunge un momento imbardante a stringere, cioè riduce la tendenza della moto ad andare dritta e, se il baricentro è alto, può addirittura arrivare a spingerla a chiudere la curva.

1.4 Effetti della diversa posizione del baricentro
La posizione del baricentro influenza profondamente il comportamento della moto.
1.4.1 Variazione della posizione longitudinale
Quando il baricentro si trova sulla verticale del centro dell’interasse, il carico statico (cioè il peso da fermo) della moto grava in misura uguale su entrambe le ruote. Via via che il baricentro viene spostato in avanti, aumenta il carico statico sulla ruota anteriore e diminuisce corrispondentemente quello sulla ruota posteriore, e viceversa. A parità di altezza del baricentro, una moto con il baricentro avanzato:
- ha più aderenza usando il freno anteriore, anche sui fondi scivolosi
- impenna con maggior difficoltà
- ha meno trazione in accelerazione
- si ribalta in avanti più facilmente.
- ha più trazione in accelerazione, anche sui fondi scivolosi
- si ribalta in avanti con maggior difficoltà
- ha meno aderenza usando il freno anteriore
- impenna più facilmente.
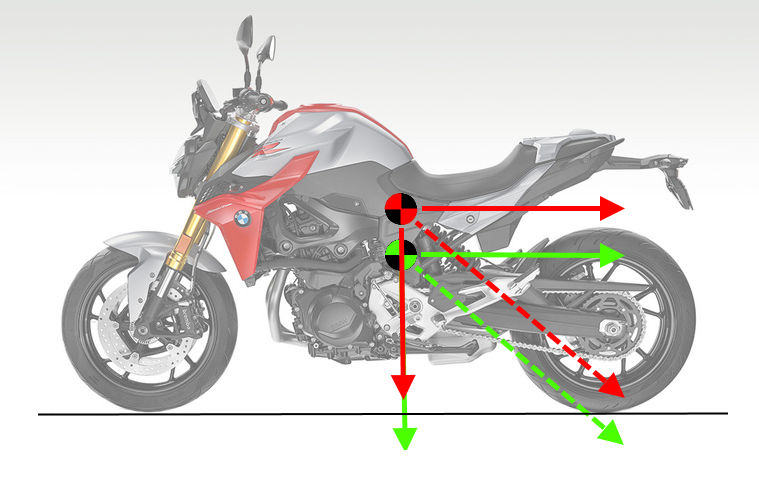
1.4.2 Variazione dell’altezza
In generale, una moto con il baricentro alto è più reattiva e maneggevole di una col baricentro basso, in quanto:
- ha più trazione in accelerazione, perché il trasferimento di peso sulla ruota posteriore avviene più rapidamente
- ha più aderenza usando il freno anteriore, perché il trasferimento di peso sulla ruota anteriore avviene più rapidamente
- è soggetta a una minor forza centrifuga a parità di velocità di percorrenza (cioè di velocità angolare) e raggio della traiettoria seguita dalle ruote, perché il baricentro percorre una traiettoria più vicina al centro geometrico della curva.
- la moto deve rollare per un angolo minore per passare da curva a controcurva
- il baricentro segue una traiettoria più interna, con minor forza centrifuga da vincere
- la moto chiude meglio la curva in accelerazione, grazie al maggior momento imbardante dovuto all’aumentata distanza tra la traiettoria della ruota posteriore e il baricentro.
- è limitata nell’accelerazione massima dal fatto che impenna più facilmente
- è limitata nella frenata al limite dal fatto che si ribalta in avanti più facilmente
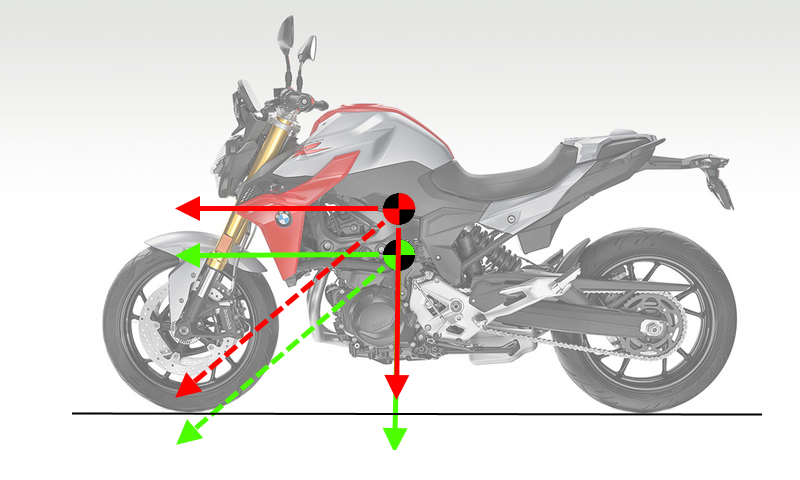
- tende ad allargare di più la traiettoria in frenata, a causa del maggior momento imbardante dovuto all’aumentata distanza tra le traiettorie delle ruote e il baricentro.
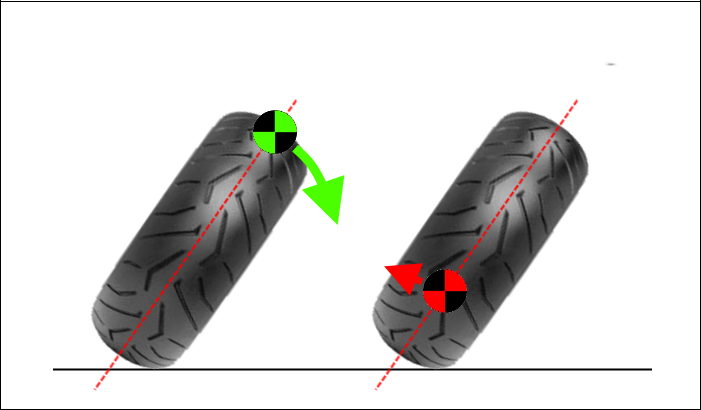
- si deve inclinare di meno in curva a causa della larghezza degli pneumatici e questo riduce il tempo necessario per rollare da curva a controcurva. Il fenomeno è illustrato nella figura che segue:
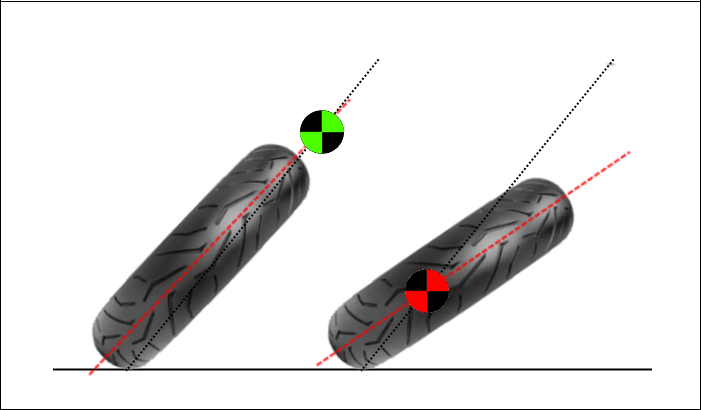
- è facilitata nell’inserimento in curva dal fatto che il baricentro si sposta di lato più rapidamente all’inclinarsi della moto e perciò vince più facilmente la resistenza creata dallo spostamento verso l’interno del punto di contatto dello pneumatico a terra dovuto alla larghezza di questo – se il baricentro è molto basso e la ruota posteriore è molto larga e piatta, può addirittura diventare difficile o impossibile inclinare la moto [2], come nell’esempio a destra della figura che segue:
1.4.3 Variazione della posizione laterale
Il baricentro della moto si trova di solito nel piano di mezzeria della stessa [3]. Il pilota invece può spostarsi lateralmente e quindi modificare la posizione del baricentro del sistema moto + pilota per variare l’inclinazione e modificare la traiettoria, come abbiamo visto nella Parte 1 di questo articolo.
1.5 Sospensioni
Le sospensioni sono studiate con cura in sede di progetto per assicurare il miglior compromesso tra tenuta di strada e confort in rapporto all’uso per il quale la moto è destinata. Sull’argomento si potrebbero scrivere libri, qui di seguito ci limiteremo a vedere le nozioni più importanti ai fini del controllo della moto in curva. I parametri importanti delle sospensioni sono:
- l’escursione – o corsa – cioè la distanza che le ruote percorrono tra la massima compressione e la massima estensione
- la rigidità, cioè la forza con cui resistono alla compressione.
- favoriscono l’assorbimento delle sconnessioni
- evitano le perdite di aderenza delle ruote sullo sconnesso
- riducono le oscillazioni e quindi l’inerzia delle masse sospese – cioè di tutto quello che sta sopra alle molle delle sospensioni: telaio, motore, persone, bagagli ecc.
- diminuiscono la compressione delle sospensioni in piega dovuta alla forza centrifuga, massimizzando l’angolo di inclinazione possibile.
1.5.1 Escursione
L’escursione delle sospensioni è decisa dal progettista e non può essere modificata dal pilota. In linea di massima, a moto ferma e pilota di peso standard a bordo, le sospensioni risultano compresse per circa un terzo della loro escursione, in modo da potersi comprimere per altri due terzi o estendersi per un terzo in base ai trasferimenti di carico e alle sconnessioni della strada. Piloti più leggeri o pesanti della media richiedono la regolazione del precarico delle molle (e in casi estremi la loro sostituzione con altre più adatte) per compensare la variazione di peso e mantenere l’assetto conforme al progetto, e un adattamento ancora maggiore è richiesto quando si trasportano passeggero e bagagli. Perciò è indispensabile regolare almeno la sospensione posteriore – quella che sopporta la maggior parte del carico aggiuntivo – ogni volta che si cambia configurazione. Mantenere un precarico insufficiente peggiora notevolmente il comportamento della moto sotto vari i punti di vista:
- peggiora nettamente l’assorbimento delle sconnessioni
- lo sterzo diventa:
- meno preciso
- meno rapido
- più pesante
- diminuisce la luce a terra in curva.
- adottate una sella più bassa
- se ciò non basta, acquistate la versione ribassata del modello, se disponibile
- se tale versione non è disponibile, cambiate i vostri sogni.
1.5.2 Rigidità
La rigidità della sospensione dipende dalla molla, che può essere più o meno rigida, e dall’ammortizzatore, che può essere più o meno frenato. Contrariamente a quanto molti credono, la regolazione del precarico non ha alcuna influenza sulla rigidità della sospensione, anche se essa può influenzare in peggio la capacità di assorbire le sconnessioni, se il precarico è eccessivo o troppo basso, perché la sospensione raggiunge più facilmente il fondo corsa in estensione o in compressione. Sulle sospensioni più economiche, la rigidità non è regolabile e molla ed ammortizzatore sono scelti in base all’uso per cui la moto è progettata. Salendo di livello diventano disponibili regolazioni della frenatura idraulica dell’ammortizzatore più o meno sofisticate e ampie, in modo da cucirsi addosso l’assetto su misura o, più di frequente, combinare disastri dovuti all’incompetenza. Le moto più sofisticate offrono sospensioni a controllo elettronico che adattano il proprio comportamento alle condizioni del fondo stradale e in base alle scelte effettuate dal pilota durante la guida.
1.5.3 Sospensioni pro-dive e anti-dive
La forcella tradizionale è inclinata in modo tale che quando essa si comprime, l’asse della ruota arretra; per tale ragione, l’uso del freno anteriore la fa comprimere più di quanto sia necessario a causa del trasferimento di carico. In altre parole, la forcella ha un comportamento pro-dive, tanto maggiore, quanto maggiore è il suo angolo rispetto alla verticale.
- una maggior capacità di assorbimento delle sconnessioni dovuta all’adozione di molle e ammortizzatori più morbidi rispetto a quelli necessari con le forcelle tradizionali
- un aumento del comfort dovuto all’assetto piatto in frenata
- una maggior stabilità in frenata, dovuta al mancato accorciamento dell’interasse
- una ridotta tendenza a bloccare la ruota anteriore in frenata, grazie al minor tempo necessario per ottenere il trasferimento di carico sull’anteriore.

1.6 Momento sterzante dovuto alla frenata anteriore
A moto inclinata, il punto di contatto di una ruota a terra si sposta verso l’interno della curva, mentre l’asse di sterzo giace sempre nel piano di simmetria della moto. Per tale ragione, una frenata anteriore genera un momento che tende a chiudere lo sterzo e quindi a sbilanciare la moto verso l’esterno, allargando la traiettoria.

2 Gestire la traiettoria con la variazione della velocità
Abbiamo visto nella Parte I di questo articolo che lo sterzo e lo spostamento del corpo del pilota consentono di inclinare e quindi far deviare la moto in qualsiasi situazione della guida, sia in rettilineo che a curva già impostata. Freni e gas non consentono di impostare una curva, in quanto a sterzo e moto dritti ogni loro effetto si esplica nel piano verticale di simmetria della moto [4], però a moto inclinata hanno effetti sulla sua traiettoria e quindi possono essere usati a tale scopo. Le variazioni di velocità in curva influiscono sull’inerzia della moto, sui carichi gravanti sulle ruote, sulle derive degli pneumatici e sulla direzione dello sterzo, perciò l’analisi dei loro effetti sul comportamento della moto deve tenere conto contemporaneamente di tutti questi aspetti. Inoltre, gli effetti prodotti variazioni nella direzione degli pneumatici sulla traiettoria della moto in curva sono più complessi da analizzare che sulle auto, in quanto bisogna tenere presente che:
- ogni variazione nella direzione delle ruote non genera solo una variazione della traiettoria, ma anche una variazione dell’inclinazione e questo, come abbiamo visto nel paragrafo 1.4 della Parte I, influenza a sua volta la traiettoria
- ciascuna manovra produce effetti contrastanti fra loro, perciò il risultato complessivo può andare in una direzione o in quella opposta, secondo quali effetti prevalgono
- finché non si raggiunge il limite di aderenza, la traiettoria della moto è determinata dalle sue variazioni di inclinazione conseguenti alle variazioni nella direzione delle ruote, mentre all’approssimarsi del limite di aderenza, gli pneumatici non riescono più a stringere la traiettoria, che quindi in questi casi è decisa dalle derive e dalla forza centrifuga.
- finché c’è aderenza, ciò sbilancerà la moto verso l’interno e quindi essa stringerà la traiettoria
- una volta raggiunto il limite, la moto non riuscirà a stringere la traiettoria, anzi, la allargherà, perché l’avantreno scivolerà verso l’esterno, e insistendo, perderà l’aderenza e la moto finirà in una caduta low-side (cioè con il pilota sul lato interno della curva).
2.1 Accelerazione
L’accelerazione della ruota posteriore causa i seguenti effetti sull’assetto della moto:
- sottrae aderenza disponibile alla ruota posteriore
- induce un momento imbardante che tende a far stringere la traiettoria
- aumenta la forza centrifuga, con tendenza ad allargare la traiettoria
- induce un trasferimento di carico dalla ruota anteriore a quella posteriore, che determina:
- l’estensione della forcella, con conseguente riduzione della maneggevolezza
- l’aumento della deriva della ruota anteriore
- la diminuzione della deriva della ruota posteriore
- la componente laterale della forza accelerante impressa alla ruota posteriore ne aumenta la deriva, in contrasto con quanto visto al punto precedente, tanto più, quanto maggiore è l’accelerazione.
- dalla forza dell’accelerazione
- dalla posizione del baricentro
- dall’avvicinamento al limite di aderenza.
- se l’accelerazione è lieve, lo sbilanciamento verso l’interno dovuto al gioco delle derive compensa il momento raddrizzante dovuto all’inerzia e la moto tende a mantenere la traiettoria impostata
- all’aumentare dell’accelerazione, l’effetto complessivo dipende dalla posizione del baricentro della moto:
- con un baricentro alto, prevale l’effetto imbardante a stringere e la moto continua a mantenere la traiettoria impostata senza alcuna difficoltà
- con un baricentro basso, l’effetto imbardante a stringere non prevale e la moto tende ad andare dritta
- se l’accelerazione è eccessiva, la ruota posteriore supera il proprio limite di aderenza e derapa verso l’esterno e:
- se il pilota riesce a controsterzare e a modulare l’accelerazione, controlla la sbandata
- se il pilota non riesce, la moto cade in low-side avvitandosi verso l’interno
- se il pilota chiude il gas, la ruota posteriore riacquista bruscamente aderenza a moto sbandata, sbilanciandola con violenza verso l’esterno (high-side).
2.2 Frenata anteriore
2.2.1 Effetti sull’assetto
La frenata della ruota anteriore causa i seguenti effetti sull’assetto della moto:
- sottrae aderenza disponibile alla ruota anteriore
- induce un momento imbardante che tende a far allargare la traiettoria
- riduce notevolmente la forza centrifuga, con tendenza a stringere la traiettoria
- induce un trasferimento di carico dalla ruota posteriore a quella anteriore, che determina:
- la compressione della forcella, con conseguente aumento della maneggevolezza
- la diminuzione della deriva della ruota anteriore
- l’aumento della deriva della ruota posteriore
- la componente trasversale della forza frenante dovuta alla traiettoria curva aumenta la deriva della ruota anteriore, in contrasto con quanto visto al punto precedente, tanto più, quanto più forte è la frenata
- determina un ulteriore affondamento della sospensione anteriore, se questa è pro-dive (forcella normale)
- induce un momento sterzante a chiudere che tende a raddrizzare la moto, allargando la traiettoria
- dalla forza della frenata
- dalle caratteristiche dello pneumatico anteriore
- dalla posizione del baricentro
- dall’avvicinamento al limite di aderenza
- se lo pneumatico anteriore è largo e/o il suo battistrada ha un profilo turistico e/o è spiattellato, il momento sterzante diventa particolarmente evidente e la moto tende ad allargare la traiettoria, tanto più quanto più forte è la frenata – si noti che questo effetto influisce solo sulla forza esercitata dal manubrio sulle mani e non anche sulla tenuta di strada, per cui basta contrastarlo per mantenere la traiettoria
- all’aumentare della frenata, aumenta il momento imbardante ad allargare la traiettoria, tanto più, quanto più il baricentro è alto
- se la frenata è eccessiva, la ruota anteriore supera il proprio limite di aderenza, lo sterzo si chiude e la moto cade in low-side.
2.2.2 Quando si usa
Se l’effetto di chiusura dello sterzo presente sulla moto è elevato, l’uso del freno anteriore da solo può diventare controproducente, perché la moto raddrizza la traiettoria in modo eccessivo. Se invece tale effetto è ridotto, l’uso del freno anteriore consente decelerazioni notevoli in curva e quindi permette di stringere la traiettoria efficacemente, almeno finché non ci si avvicina al limite dell’aderenza, allorché gli effetti sottosterzanti prevalgono e la moto allarga con sempre maggior decisione la traiettoria.
2.3 Frenata posteriore
2.3.1 Effetti sull’assetto
La frenata della ruota posteriore è molto più blanda di quella anteriore e quindi influisce assai meno sull’assetto. Tenendo presente tale premessa, essa causa i seguenti effetti sull’assetto della moto:
- sottrae aderenza disponibile alla ruota posteriore
- riduce sensibilmente la forza centrifuga, aumentando la tendenza a stringere la traiettoria
- induce un momento imbardante che tende a far allargare la traiettoria – più lieve di quello indotto dalla frenata anteriore, vista la traiettoria più stretta percorsa dalla ruota posteriore
- induce un trasferimento di carico dalla ruota posteriore a quella anteriore – più lieve di quello indotto dalla frenata anteriore, vista la minor decelerazione possibile – che determina:
- una compressione della forcella trascurabile, perché essa è tirata indietro dal freno posteriore anziché essere compressa dall’effetto pro-dive indotto dalla frenata anteriore
- la diminuzione della deriva della ruota anteriore
- l’aumento della deriva della ruota posteriore
- la componente trasversale della forza frenante dovuta alla traiettoria curva – più lieve di quella generata dalla frenata anteriore, vista la minor decelerazione possibile – aumenta ulteriormente la deriva della ruota posteriore, tanto più, quanto più forte è la frenata.
- tende in qualsiasi circostanza a mantenere la traiettoria impostata
- se la frenata è eccessiva, la ruota posteriore supera il proprio limite di aderenza, derapa verso l’esterno e:
- se il pilota è bravo a controsterzare e a modulare la frenata, controlla la sbandata
- se il pilota tiene il freno premuto, la moto cade in low-side avvitandosi verso l’interno
- se il pilota molla il freno posteriore di scatto, la ruota posteriore riacquista bruscamente aderenza a moto sbandata, sbilanciandola con violenza verso l’esterno (caduta high-side).
2.3.2 Quando si usa
Il freno posteriore consente decelerazioni più blande rispetto a quello anteriore, ma non genera effetti negativi sulla traiettoria – almeno finché non si supera il limite di aderenza – né sullo sterzo né sulla compressione della forcella. Quindi esso è un ottimo strumento per correzioni di entità limitata, come:
- stringere la traiettoria in caso di curva presa un po’ troppo velocemente
- adattare la traiettoria nelle curve a stringere
- non allargare la traiettoria nelle curve in discesa.
2.3.3 Freno posteriore o chiusura del gas?
Gli effetti dinamici prodotti dai due comandi sono gli stessi, ma il freno è più semplice e preciso da usare rispetto alla chiusura del gas, perché:
- ha un comportamento costante e prevedibile, mentre l’effetto di una chiusura del gas varia moltissimo in base al rapporto inserito, al regime e al tipo di motore
- consente di rallentare senza chiudere il gas, evitando ogni effetto on-off.
2.4 Frenata integrale
2.4.1 Effetti sull’assetto
La frenata integrale causa i seguenti effetti sull’assetto della moto:
- sottrae aderenza disponibile ad entrambe le ruote, ma in misura minore su ciascuna di esse a parità di decelerazione rispetto alla frenata su una sola ruota
- riduce notevolmente la forza centrifuga, aumentando la tendenza a stringere la traiettoria
- induce un momento imbardante che tende a far allargare la traiettoria, ma in misura minore rispetto alla sola frenata anteriore a parità di decelerazione, perché la ruota posteriore percorre una traiettoria più stretta rispetto a quella anteriore
- rispetto alla frenata anteriore determina un momento sterzante nettamente ridotto, perché a parità di decelerazione la frenata anteriore ha un effetto minore sulla sterzata, mentre la frenata posteriore fa decelerare anche l’asse di sterzo, riducendo l’effetto
- induce un trasferimento di carico dalla ruota posteriore a quella anteriore, che determina:
- la compressione della forcella minore che nel caso della sola frenata anteriore
- la diminuzione della deriva della ruota anteriore
- l’aumento della deriva della ruota posteriore
- la componente trasversale della forza frenante dovuta alla traiettoria curva aumenta la deriva di entrambe le ruote e in particolare di quella anteriore
- nel complesso, gli effetti sulle derive non influiscono sensibilmente sulla traiettoria.
- tende in qualsiasi circostanza a mantenere la traiettoria impostata
- se la frenata è eccessiva – cosa piuttosto difficile, visto che la decelerazione ottenibile prima di superare il limite di aderenza è piuttosto elevata – tende a partire per la tangente sulle due ruote e quindi consente il recupero semplicemente riducendo la frenata.
2.4.2 Quando si usa
L’uso combinato dei due freni in curva è sempre possibile ed è nel complesso assai più efficace rispetto agli altri modi di frenare, perché:
- presenta in misura assai minore l’effetto negativo sulla sterzata possibile con sola la frenata anteriore
- consente decelerazioni assai maggiori senza mettere in crisi l’aderenza rispetto alla sola frenata posteriore
- riduce l’affondamento della sospensione anteriore, migliorando la frenata sullo sconnesso e rendendo la guida più comoda, specialmente per il passeggero.
[1] Se la strada è pianeggiante. Sui dossi il peso totale diminuirebbe e sulle cunette aumenterebbe. ⇑ [2] Questo fatto si verifica normalmente sui dragster, che hanno baricentro bassissimo e gomma posteriore molto larga e squadrata. ⇑ [3] Una eccezione famosa è costituita dalle Vespa con cambio meccanico, sempre sbilanciate a sinistra per compensare il peso del motore posto a destra della ruota posteriore. ⇑ [4] Fanno eccezione alcune moto con albero motore longitudinale, come le vecchie BMW con motore boxer e le Moto Guzzi, dove le variazioni di regime del motore influiscono sensibilmente sull’inclinazione della moto. ⇑
Dai un’occhiata ai nostri Corsi di Guida Sicura, ai nostri Tour in Moto e ai nostri Tour in Miata!
Share:
Ottimo articolo descrive in maniera minuziosa e aiuta a capire in modo perfetto quei dettagli che chi non è come me non è un centauro super navigato non riesce a capire bene grande claudio
Grande e grazie Claudio è un articolo da rileggere più volte (almeno per me) per cercare di capire il più possibile tutti i comportamenti e le dinamiche da te descritte in modo molto tecnico e comprensibile della moto in curva.