La tecnica motociclistica e la fisica che ne regola il comportamento, miti da sfatare e leggende da verificare, uno spazio per due chiacchiere su quel misterioso e affascinante oggetto chiamato motocicletta.
Nello scrivere la recensione della mia BMW K1200GT del 2007, dotata della sua brava strumentazione a lancette, mi è venuto spontaneo fare una riflessione sull’uso dell’infotainment nei veicoli moderni, e dato che l’argomento è di interesse generale e non riguarda solo chi è interessato alle K, ho preferito ricavarne un articolo a parte.
Cruscotto della K1200GT 2007
All’epoca il digitale era entrato da qualche anno nelle strumentazioni, però si trattava di LCD monocromatici, che di solito affiancavano soltanto il tradizionale contagiri a lancetta e, soprattutto, non era prevista la possibilità di connessione con lo smartphone, tipica della produzione attuale. Certo, al paragone con i display TFT attuali, le strumentazioni degli anni 2000 sembrano residuati della Grande Guerra. Però mi chiedo: con questi fantastici schermi che mostrano tutto in Technicolor, la vita a bordo è davvero migliore? Fuffa a parte, secondo me no, per diverse ragioni, e il discorso vale sia sulle moto che sulle auto.
Innanzitutto, grafica a parte, la quantità di informazioni utili alla guida a disposizione su una strumentazione moderna è la stessa identica che ho sulla mia K e su qualsiasi altra buona strumentazione dell’epoca. Ciò che cambia veramente è l’aggiunta di informazioni accessorie, cioè l’infotainment e la navigazione GPS, ma la loro introduzione è proprio la causa principale dei problemi che sorgono nell’uso dei moderni display. Infatti, la necessità di gestire una mole enorme di informazioni ha costretto i costruttori ad implementare complicati menù per la loro gestione, e per quanto si siano sforzati per semplificarne l’uso, introducendo rotelloni, joystick e simili, la navigazione rimane un fatto che richiede tanto tempo e attenzione, distraendo dalla guida, senza contare il tempo perso a studiarsi almeno a grandi linee le decine di pagine (46 sulla BMW R1200GS e oltre 60 sulla Moto Guzzi V100 Mandello!) che ogni manuale ormai dedica all’argomento.
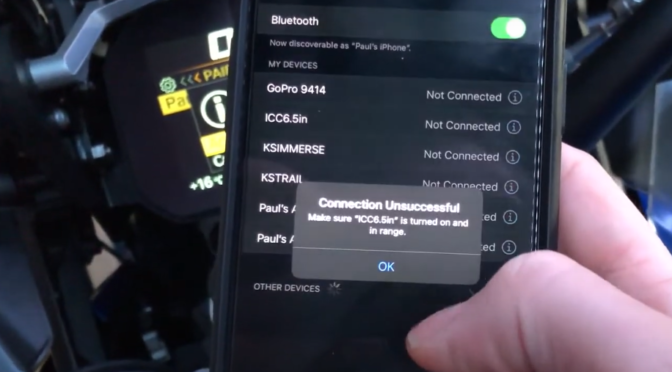
Inoltre, l’infotainment e la navigazione GPS fanno affidamento sullo smartphone e quindi richiedono il suo accoppiamento con il sistema bluetooth alla strumentazione, oltre che al sistema vivavoce installato nel casco del pilota. Ora, di tecnologia ne mastico un po’, ma fino ad oggi non ho trovato una sola moto o auto dove la connessione tra smartphone e strumentazione di bordo non mi abbia dato problemi, non solo in fase di prima installazione, ma anche nell’uso normale. Innanitutto, occorre studiare il manuale e perdere tempo per capire come si fa. Poi bisogna ralizzare la connessione, e alzi la mano chi ci è riuscito la prima volta. Poi ci sono le mancate riconnessioni alla ripartenza, con conseguente, macchinoso disaccoppiamento e ripetizione della procedura, un problema che non dovrebbe nemmeno esistere, ma è esperienza frequente. Inoltre, la manovra delle funzioni dello smartphone attraverso la strumentazione è molto più macchinosa di quella possibile sullo smartphone stesso.
Come se tutto questo non bastasse, la visualizzazione della mappa del navigatore sul display TFT avviene spesso solo sotto forma di pittogrammi e indicazioni scritte, ma anche nei casi in cui è riprodotta una mappa, questa non è la stessa che si vede in Google Maps o in Waze e di solito manca di alcune informazioni importanti e in particolare di quelle relative agli autovelox.
Schermata del navigatore su una BMW R1250GS
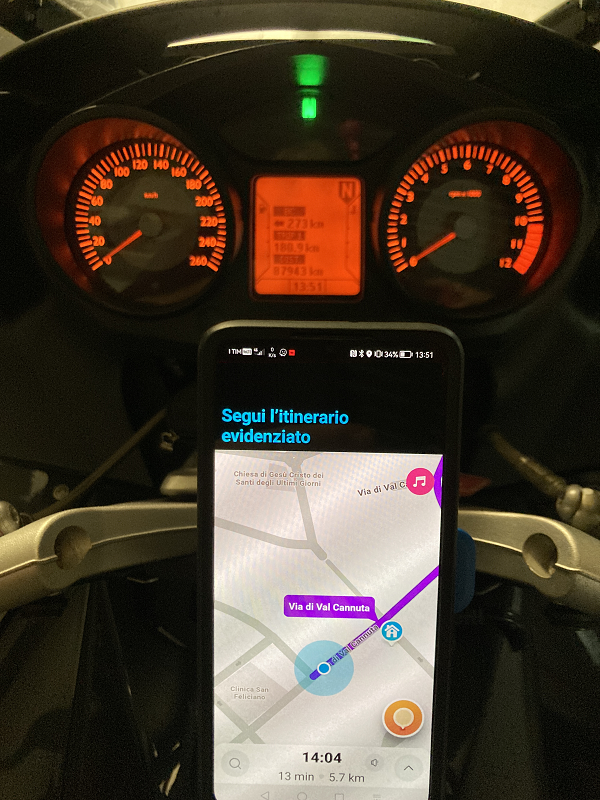
Ma allora, non è meglio lasciare alla strumentazione i suoi compiti tradizionali, e usare direttamente lo smartphone per tutto il resto? È esattamente ciò che faccio sulla mia K e mi trovo benissimo, molto meglio che su una moto attuale. L’ho installato sul manubrio in posizione perfetta, utilizzando la basetta del navigatore originale BMW, sulla quale ho montato un supporto della Quad Lock, con un innesto a baionetta che si aggancia a una robustissima cover dedicata e non può sganciarsi accidentalmente in alcun modo. Inolte ho montato una presa USB stagna per la ricarica, che comunque sugli smartphone più moderni può essere fatta anche con il sistema wireless.
Supporto Quad LockLo smartphone montato sul supporto
Il montaggio all’aria aperta fa sì che il telefono non vada in surriscaldamento. Una cover di gomma trasparente protegge il telefono in caso di pioggia battente, anche se a dire il vero non l’ho mai usata, perché sulle grandi tourer è quasi impossibile che si bagni. La maggior parte dei guanti tecnici attuali consente l’uso del display senza grossi problemi. Scrivere non è possibile, ma di solito la destinazione si imposta prima della partenza, e comunque Waze e Google Maps accettano i comandi vocali e hanno pulsanti grandi e azionabili anche con i guanti, e lo stesso vale per i comandi principali dei migliori lettori di musica.
Di recente, BMW ha iniziato ad offrire in aftermarket un supporto per smartphone che ne consente l’uso tramite il rotellone Multicontroller. Potrebbe essere l’inizio di un ripensamento? Lo spero proprio.
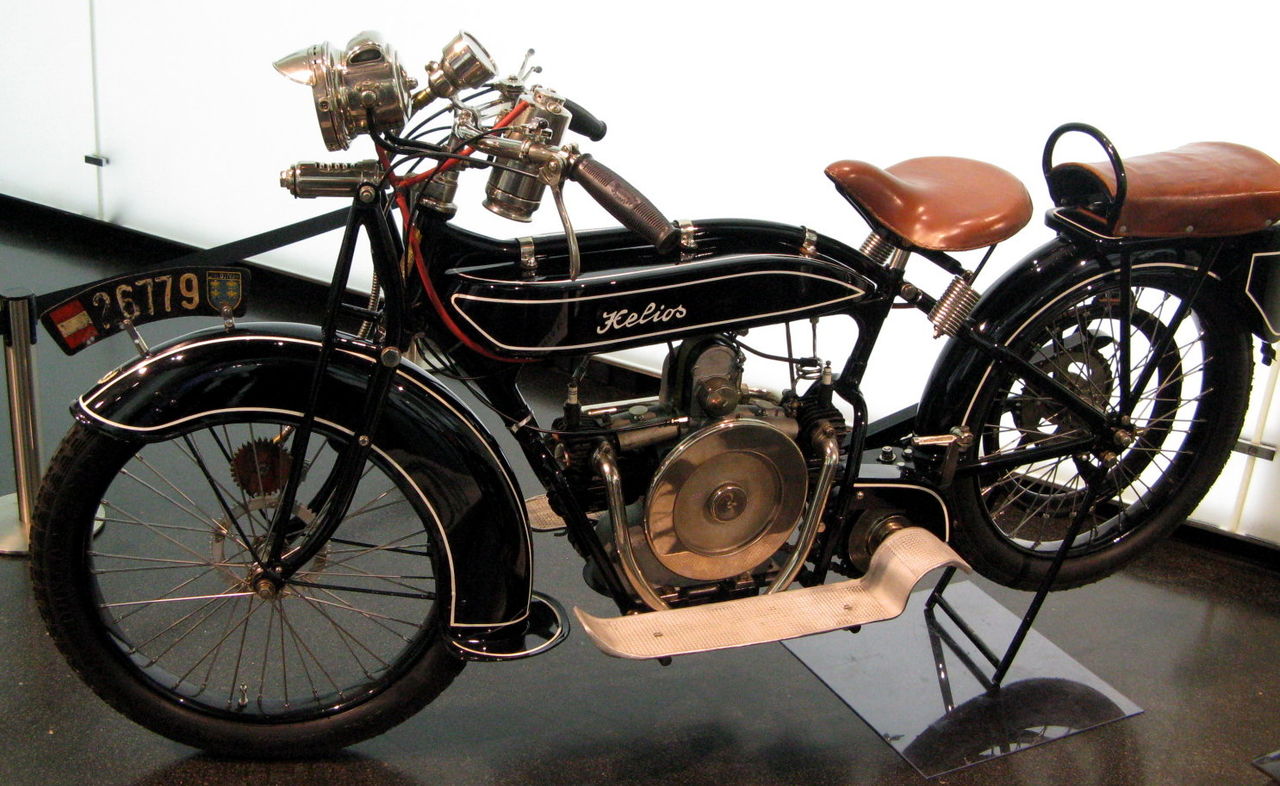
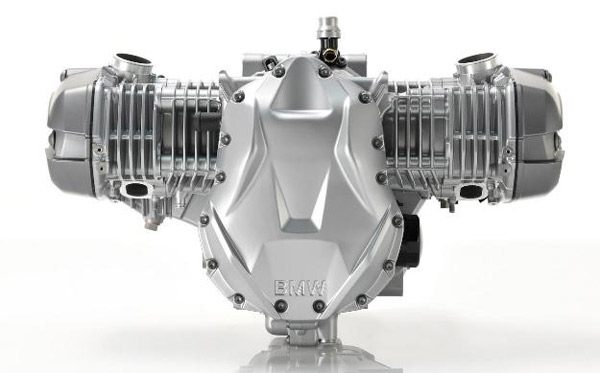
BMW è indissolubilmente legata al boxer a due cilindri, ma non molti sanno che questo tipo di motore in realtà era stato brevettato da Karl Benz – sì, proprio quello della Mercedes-Benz – nel 1896 ed era già piuttosto diffuso nel settore delle due ruote prima che BMW iniziasse a progettare motociclette. Esso però era disposto longitudinalmente, con un cilindro davanti e uno dietro, perché ciò consentiva di azionare la ruota posteriore attraverso una semplice catena, come avviene di solito sulle moto.
Bayerische Flugzeugwerke Helios del 1921 con motore boxer longitudinale
Come si può facilmente immaginare, tale configurazione dava problemi di raffreddamento al cilindro posteriore, perciò, quando la Casa, che fabbricava motori di tutti i generi – si chiamava appunto Bayerische Motoren Werke, cioè Fabbrica di Motori Bavarese – decise di realizzare una propria motocicletta, il responsabile del progetto, Max Fritz, scelse di installare il boxer trasversalmente. Nacque così nel 1923 la R32, la prima moto BMW, che inaugurò lo schema meccanico ancora usato nella serie R ai nostri giorni.
In effetti, questa architettura offre molti vantaggi rispetto agli altri bicilindrici: basso baricentro, poche vibrazioni, ottima regolarità anche ai bassi regimi, perfetto raffreddamento dinamico ed estrema facilità di accesso alle parti meccaniche di più frequente manutenzione, cioè le candele e le valvole. Il principale svantaggio è che la disposizione longitudinale dell’albero motore rende necessario inserire una coppia conica – cioè due ingranaggi angolati a 90° – all’uscita del cambio, per avere il pignone orientato correttamente, soluzione costosa sia in termini economici che di assorbimento della potenza. Una volta fatto questo passo, tanto vale eliminare la catena con tutto il suo strascico di seccature e adottare un albero di trasmissione. Ecco il perché dell’indissolubile legame tra boxer e cardano, un’accoppiata che ha fatto di BMW la scelta ideale per viaggiare con pochi problemi e in qualsiasi clima. Non a caso, pur avendo ottenuto numerosi successi nelle competizioni, con il passare del tempo la Casa di Monaco aveva acquistato una solida fama di costruttore di raffinate, comode, potenti e affidabili moto da turismo.
Nascita della serie K
Nel 1968 l’arrivo della straordinaria Honda CB750 Four scosse alle fondamenta il mondo della due ruote. Bella e ben fatta, sfoggiava un modernissimo quattro cilindri in linea potente, affidabile e in grado di offrire un livello di vibrazioni e una regolarità di funzionamento impossibili per i bicilindrici, ma soprattutto costava parecchio meno delle sue possibili concorrenti europee. BMW occupava una nicchia di mercato esclusiva e quindi non soffrì come altri costruttori per l’arrivo di questo modello, ma comunque decise di non stare con le mani in mano e cominciò a studiare nuovi schemi motoristici. Oltre a vari boxer bicilindrici perfezionati, studiò anche un boxer a 4 cilindri (https://www.motociclismo.it/bmw-k-100-1000-69926) e un sensazionale quattro cilindri a V di 168° (https://www.moto.it/news/massimo-clarke-i-boxer-sconosciuti-quarta-parte.html). Tuttavia, le BMW con il classico boxer continuavano a vendere, per cui questi progetti rimasero sulla carta.
Le cose però cambiarono verso fine degli anni ’70, allorché l’introduzione di regolamentazioni antinquinamento particolarmente stringenti negli USA e la sempre maggior diffusione delle pluricilindriche giapponesi, le cui schede tecniche diventavano sempre più irraggiungibili dalla concorrenza mondiale, spinsero la Casa Bavarese a decidere l’adozione di un motore a 4 cilindri. La scelta più naturale sarebbe stata quella di ripescare il boxer 4 cilindri o il 4V a 168° progettati qualche anno prima, ma il primo sarebbe sembrato una scopiazzatura della magnifica Honda GL1000 Gold Wing uscita del 1975, mentre il secondo fu giudicato troppo complesso. Inoltre, BMW non si sarebbe mai abbassata a imitare il quattro in linea trasversale delle altre giapponesi.
Per risolvere il problema, occorreva pensare fuori dagli schemi, e questo fu appunto ciò che Stefan Pachernegg e Josef Fritzenwenger – rispettivamente responsabile del nuovo progetto e della sua parte meccanica – fecero, quando decisero di realizzare un prototipo con il motore preso in prestito da una Peugeot 104.
Peugeot 104
La scelta cadde sull’utilitaria francese, perché il suo propulsore di alluminio a quattro cilindri raffreddato a liquido da 954 cc, oltre a essere compatto e leggero, era montato sotto il cofano con un angolo di ben 72° rispetto alla verticale e quindi era già praticamente pronto per l’uso che i progettisti avevano in mente. Infatti, esso fu montato sul prototipo longitudinalmente e con i cilindri orizzontali, in modo da avere la testata a sinistra e l’albero motore a destra. Questa disposizione, una prima assoluta, era geniale e perfetta per una BMW, perché manteneva il baricentro basso tipico dei boxer, ma in più consentiva una serie di altri vantaggi importanti: straordinaria accessibilità meccanica, regolarità di rotazione e possibilità di potenze elevate tipiche dei quattro cilindri, minor ingombro laterale e facilità di accoppiamento con la trasmissione ad albero. L’idea era assolutamente folle, ma piacque ai Grandi Capi BMW e così fu approvato lo sviluppo del nuovo progetto. Il prototipo Peugeot fu distrutto e di esso non esiste più neanche una fotografia.
Volendo realizzare un quattro cilindri in linea raffreddato a liquido, fu naturale cercare di avvalersi dell’aiuto della divisione auto della Casa. Addirittura, l’idea iniziale fu quella di sviluppare un motore da 1600 cc che potesse essere impiegato sia sulle due che sulle quattro ruote. La cosa però si rivelò non fattibile, perché la sua associazione con una trasmissione motociclistica avrebbe comportato ingombri incompatibili con la statura umana media. Si cominciò quindi a lavorare a un sistema integrato di motore e trasmissione di dimensioni compatte, in tedesco Kompakt, ed è per questo che la lettera K divenne identificativa della nuova serie.
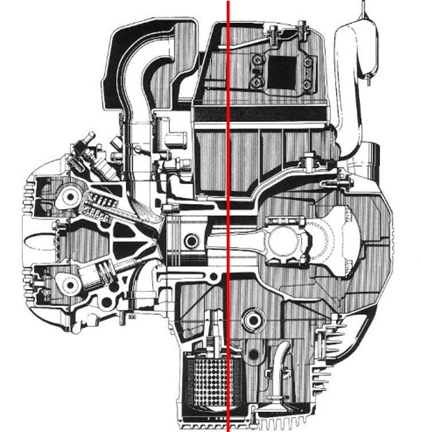
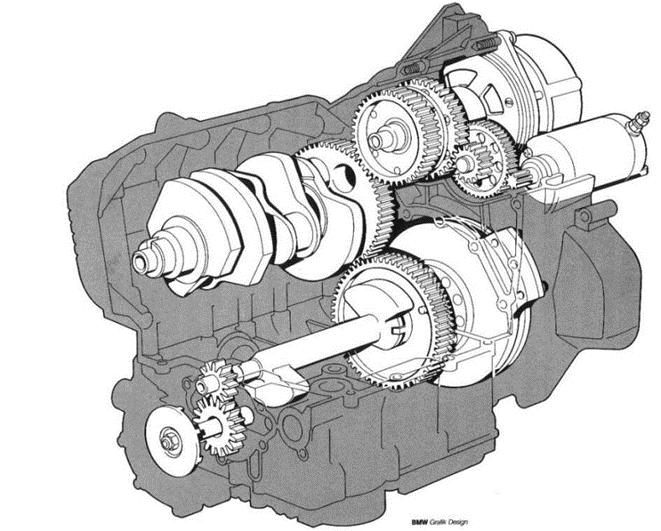
Fin dall’inizio furono previste due varianti: un quattro cilindri 987 cc con 90 CV e un tre cilindri 740 cc con 75 CV, entrambi a corsa lunga con due valvole per cilindro e distribuzione bialbero in testa. Il loro schema presenta diverse particolarità interessanti. Innanzitutto, prima delle BMW K, tutti i motori motociclistici erano sempre stati sostanzialmente simmetrici rispetto al piano longitudinale della moto – con la notevolissima eccezione delle Vespa, che infatti dinamicamente era ed è tuttora un disastro – perché ciò risolve automaticamente qualsiasi problema di bilanciamento trasversale. Invece, il nuovo motore “a sogliola” – così chiamato appunto perché adagiato su un fianco – è fortemente asimmetrico ed è anche sbilanciato, in quanto l’albero motore pesa più di tutto il resto; ecco perché è montato in modo da sporgere un po’ di più a sinistra che a destra.
Sezione del motore K della BMW K100. La linea rossa è la mezzeria della moto
Un’altra caratteristica notevole dello schema meccanico K è il fatto che, diversamente dai motori boxer e V2 Moto Guzzi dell’epoca, la moto non tende a rollare in direzione opposta al senso di rotazione albero motore quando si accelera, grazie al fatto che l’alternatore e la frizione ruotano in senso contrario rispetto ad esso e quindi ne compensano la coppia di rovesciamento. Non si tratta però di una prima assoluta, perché uno schema analogo era già presente fin dal 1975 sulle Honda Gold Wing.
Manovellismi del motore della BMW K75. Si notino i contrappesi sull’albero della trasmissione primaria
Una volta risolto il problema della coppia di rovesciamento, questa disposizione offre un vantaggio interessante, in quanto aumenta la maneggevolezza della moto in curva. Infatti, sulle moto “normali” l’albero motore, che è posto trasversalmente e gira nello stesso verso delle ruote, determina in curva un particolare effetto di precessione giroscopica che impone alla moto di inclinarsi più di quanto dovrebbe a parità di velocità e raggio della traiettoria, riducendone la maneggevolezza (https://thesis.unipd.it/bitstream/20.500.12608/28121/1/Marconi_Edoardo_tesi.pdf).
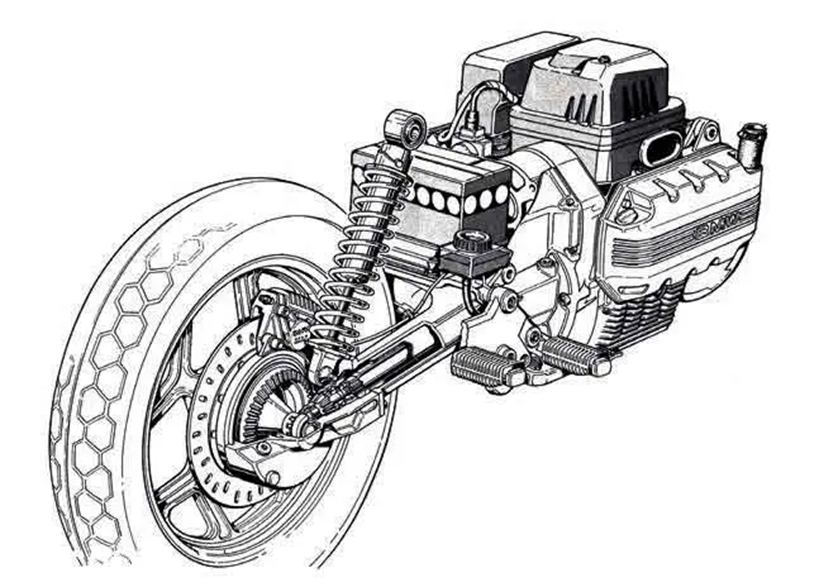
La nuova serie K introduceva diverse altre particolarità interessanti. Innanzitutto, il motore ha funzione portante, in quanto sostiene il forcellone monobraccio e costituisce l’elemento stressato inferiore di un originale telaio a traliccio. Inoltre, per la prima volta su una BMW venne adottato un impianto di iniezione elettronica, mutuato dai motori automobilistici della Casa.
Gruppo motore-trasmissione della BMW K100Telaio della BMW K100
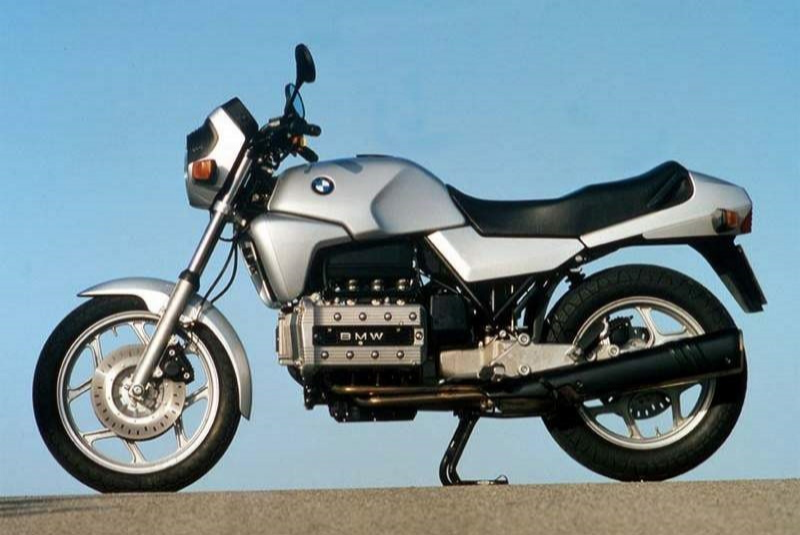
Alla sua presentazione, avvenuta nel 1983, la nuova K100 lasciò tutti a bocca aperta. Diversissima dalle altre BMW, non somigliava neanche a qualsiasi moto della concorrenza. La sua meccanica inconfondibile fu lasciata bene in vista anche nelle versioni carenate e l’unione tra il motore dalla forma squadrata – da cui il soprannome inglese “flying brick”, cioè “mattone volante” – e le linee moderne ed eleganti era qualcosa di decisamente unico.
La nascita della serie K fu però vissuta come un vero shock dai clienti più tradizionalisti dell’Elica – cioè la stragrande maggioranza – presi dal terrore che essa avrebbe portato alla fine della serie R con motore boxer. BMW dovette perciò affrettarsi a precisare che la serie K non avrebbe mai soppiantato i modelli tradizionali e, in effetti, le R non sono mai scomparse dal listino e costituiscono ancora oggi il grosso delle vendite della Casa.
Fin da subito furono previsti diversi modelli con la stessa meccanica. La naked K100 fu la prima ad essere presentata, poi seguì la sport-tourer K100RS, che con la sua snella carenatura era la più veloce della serie – 220 km/h nonostante i soli 90 CV – ma offriva anche una protezione aerodinamica eccellente e non a caso fu la più venduta.
BMW K100RS
Seguirono nel 1984 la tourer K100RT, caratterizzata dalla carenatura grande e squadrata, e nel 1986 la sua versione di lusso K100LT.
BMW K100RT
Nel 1985 furono presentate le K75C e K 75S, equipaggiate con il motore a 3 cilindri da 740 cc con 75 CV. La prima era una naked con cupolino e freno posteriore a tamburo, mentre la seconda aveva una mezza carenatura sportiveggiante e il freno posteriore a disco della K100.
BMW K75S
Nel 1986 la K75C perse il cupolino e prese il nome di K75, mentre nel 1989 si aggiunse la tourer K75RT, con carenatura integrale simile a quella della K100RT. Questa serie rimase in listino fino al 1996 senza variazioni di rilievo ed è sempre stata molto apprezzata per le buone prestazioni, i consumi inferiori rispetto alle K100 e il minor livello di vibrazioni, efficacemente smorzate dagli appositi contrappesi posti sull’albero di trasmissione primario.
Evoluzione delle K a sogliola
Per oltre un decennio le K si sono evolute costantemente, ma senza stravolgimenti. Particolarmente importante fu il 1988, anno in cui il primo ABS motociclistico al mondo fu offerto come optional su tutta la gamma K e nacque la K1. Caratterizzata dalla carenatura estremamente aerodinamica comprendente un voluminoso codone smontabile e dalle colorazioni fin troppo vistose – sembrava più l’opera di un preparatore tedesco dai gusti pacchiani, che di un rinomato costruttore di moto di lusso – questa moto decisamente fuori dagli schemi era equipaggiata con freni più efficaci, gomme radiali, sospensione posteriore Paralever con braccio di reazione, mutuata dalle R80/100GS e in grado di evitare il sollevamento del retrotreno in accelerazione indotto della trasmissione a cardano, e un nuovo motore a 16 valvole da 100 CV che, grazie all’eccezionale profilatura aerodinamica, permetteva di raggiungere i 240 km/h. Tutte queste innovazioni vennero successivamente estese anche alle altre K100.
Nel 1991 apparve la luxury tourer K1100LT, seguita l’anno successivo dalla sport tourer K1100RS, entrambe riviste marginalmente nella carenatura e con motore portato a 1093 cc per una maggior coppia, ferma la potenza standard di 100 CV, la massima imposta all’epoca dal legislatore tedesco. In tale occasione scomparve dal listino la versione naked.
BMW K1100RS
Una svolta davvero importante avvenne nel 1996, quando la sport tourer K1100RS venne sostituita dalla K1200RS. Caratterizzata da una nuova carenatura integrale dalle fattezze giunoniche, essa conservava lo schema con motore a sogliola e forcellone monobraccio Paralever, ma per il resto era una bestia completamente nuova.
BMW K1200RS
Il motore, modificato in molte componenti, fu portato a 1171 cc con ben 130 CV. La velocità massima balzava quindi a 250 km/h e questo rese necessario abbandonare il telaio a traliccio in favore di un magnifico e particolarissimo telaio in lega leggera prodotto dall’italiana Verlicchi, con il quale il motore perdeva la sua funzione di elemento stressato e guadagnava il montaggio su silent block. Inoltre, faceva la sua comparsa la sospensione anteriore antiaffondamento Telelever, già introdotta dal 1993 sulla serie R.
Meccanica e telaio della BMWK1200RS
Grazie a queste innovazioni, la K divenne un velocissimo incrociatore da Autobahn, in grado di attraversare i continenti in poche ore con una precisione di guida ineguagliabile anche alle massime velocità e un confort di livello straordinario, al prezzo però di un peso di ben 285 kg in ordine di marcia, contro i soli 249 kg della K100RS.
Nel 1999 la luxury tourer K1100LT fu sostituita dalla K1200LT, basata sulla stessa meccanica della K1200RS, ma con potenza ridotta a 98 CV per ottenere una maggior coppia. Caratteristiche di questo modello erano l’enorme carenatura dalle linee eleganti e sinuose, una dotazione di accessori sterminata e la retromarcia elettrica, indispensabile per muovere in manovra i suoi 378 kg in ordine di marcia.
BMW K1200LT
Nel 2001 le K furono equipaggiate con il sistema frenante EVO con dischi da 320 mm e servofreni, in versione semintegrale sulla sport tourer K1200RS – che per l’occasione ricevette un leggero face lifting – e totalmente integrale sulla lussuosa K1200LT.
Nel 2003 la K1200RS fu affiancata da una versione leggermente più turistica, denominata K1200GT e caratterizzata da colorazioni più da cummenda, appendici aerodinamiche per proteggere meglio il pilota e una migliore dotazione di accessori di serie, comprendente anche due valigie laterali.
BMW K1200GT
Nello stesso periodo, la K1200LT fu aggiornata esteticamente, nella dotazione di accessori – tra i quali apparve addirittura un cavalletto centrale elettrico – e nella potenza del motore, aumentata a 116 CV.
La rivoluzione frontemarcia
Nel luglio 2004 fu presentata la K1200S. Nonostante la presenza della lettera K, questa sport tourer decisamente più snella e sportiva rispetto alla K1200RS inaugurava una serie completamente nuova. Essa è sempre caratterizzata da un quattro cilindri in linea e trasmissione finale ad albero, ma il nuovo motore da 1157 cc è disposto trasversalmente – da cui il soprannome “frontemarcia” – ha i cilindri inclinati in avanti di 55 gradi rispetto alla verticale, per mantenere basso il baricentro, ed eroga ben 167 CV. La nuova disposizione rende necessaria la presenza di una seconda coppia conica all’uscita del cambio, ma consente di aumentare l’alesaggio dei cilindri senza dover allungare eccessivamente l’interasse, in modo da ottenere un motore superquadro di caratteristiche sportive, e di adottare flussi di aspirazione e scarico più efficienti, indispensabili per arrivare alla potenza voluta.
Schema meccanico del motore della BMW K1200S
La ciclistica è basata su un telaio a doppia trave e culla aperta in lega leggera, con il motore che funge da elemento stressato, e sfoggia una sospensione posteriore Paralever profondamente rivisitata e una nuova sospensione anteriore antiaffondamento a quadrilatero deformabile, denominata Duolever.
Trasparenza della BMW K1200S
Con un peso ridotto a 248 kg – praticamente uguale a quello della prima K100RS – la S supera i 275 km/h, consente di viaggiare con spazio e confort paragonabili alla K1200RS, ma allo stesso tempo offre una guida decisamente più dinamica e sportiva e permette di divertirsi senza troppi problemi anche in pista.
BMW K1200S
Alla S seguirono la K1200R, che per la sua aria post-apocalittica fu scelta come cavalcatura di Milla Jovovich nel film Resident Evil 3, e la tourer K1200GT da 152 CV, che nonostante l’omonimia con la precedente K1200GT a sogliola, si colloca parecchio al di sopra di essa quanto a dimensioni, spazio per passeggeri e bagagli, confort e prestazioni.
BMW K1200RBMW K1200GT Frontemarcia
Alla fine del 2006 tutte le K frontemarcia furono equipaggiate con un nuovo sistema frenante integrale privo di servofreni – il vecchio aveva dato problemi di affidabilità con potenziali risvolti negativi sulla sicurezza. Con l’occasione venne introdotta anche l’elegante K1200R Sport, basata sulla naked, ma munita di una semicarenatura snella ed efficace.
BMW K1200R Sport
Alla fine del 2008 un lieve restyling e un cambio di denominazione marcò l’introduzione di un nuovo motore da 1301 cc, con potenza accresciuta a 175 CV per le K1300R e K1300S – la R Sport non fu aggiornata e sparì dal listino – e a 160 CV per la K1300GT.
Le K a sei cilindri
Il 2010 vide la nascita della K1600. Basata essenzialmente sullo stesso schema meccanico delle K1300, ma con una veste più elegante, questa moto sfoggia un sensazionale sei cilindri in linea da 1649 cc con 160 CV e ben 175 Nm di coppia massima e una nuova e sofisticatissima elettronica di controllo della guida, derivata da quella della supersportiva S1000RR del 2009. Tutti si aspettavano che questa nuova ammiraglia avrebbe sostituito l’ormai obsoleta K1200LT a sogliola ancora in listino, perciò la sorpresa fu grande, quando si scoprì che la moto veniva offerta in due versioni piuttosto diverse tra loro, K1600GTL e K1600GT, di cui la seconda andava a sostituire la K1300GT, sul mercato da meno di due anni, provocando la più solenne incazzatura collettiva nella storia del motociclismo.
Entrambi i modelli sono stati aggiornati più volte nel corso degli anni e nel 2017 sono stati affiancati dalla K1600B, dalla linea più slanciata e americaneggiante.
Alla fine del 2021, le K 1600 sono state sottoposte a un face lifting particolarmente pronunciato, evidenziato dal nuovo gruppo ottico anteriore a led e dalla nuova strumentazione TFT. In tale occasione è stata introdotta la K1600 Grand America, una versione della K1600B con più accessori ed equipaggiata con topcase.
Delle altre K, la K1300R fu tolta dal listino nel 2015, di fatto sostituita da tempo dalla hypernaked della casa, la S1000R, mentre la sport tourer K1300S lasciò il campo nel 2016 senza eredi – anche fuori da BMW – gettando nello sconforto i suoi numerosi estimatori, me compreso. La verità è che i motociclisti avevano deciso da tempo che le crossover sono fichissime e che le sport tourer sono un arnese del passato; come la setta più conservatrice del mondo dopo il Ku-Klux-Klan abbia potuto partorire una scelta così stupidamente rivoluzionaria, per me rimane un mistero insolubile.
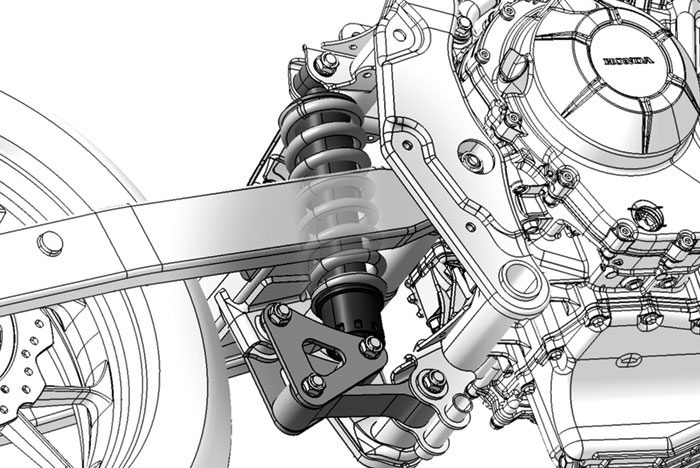
Quando sono andato a provare la BMW S1000XR, ho notato dalla documentazione che la moto è equipaggiata con una sospensione posteriore denominata Full Floater Pro. Conoscevo già il nome Full Floater, perché è una sospensione a smorzamento progressivo largamente usata da Suzuki negli anni ’80. Ora, BMW tende a chiamare “Pro” un sacco di cose che fanno anche gli altri – per esempio, l’ABS Pro non è altro che il sistema antibloccaggio dotato di funzione cornering – perciò ho pensato distrattamente che si trattasse di qualcosa del genere e ho archiviato mentalmente il tutto nel cassetto “fuffa pubblicitaria”.
Successivamente ho provato anche la S1000R, basata sulla stessa meccanica, comune anche alla supersportiva S1000RR, ma questa volta sono stato colpito da questa frase nella cartella stampa, che prima mi era sfuggita:
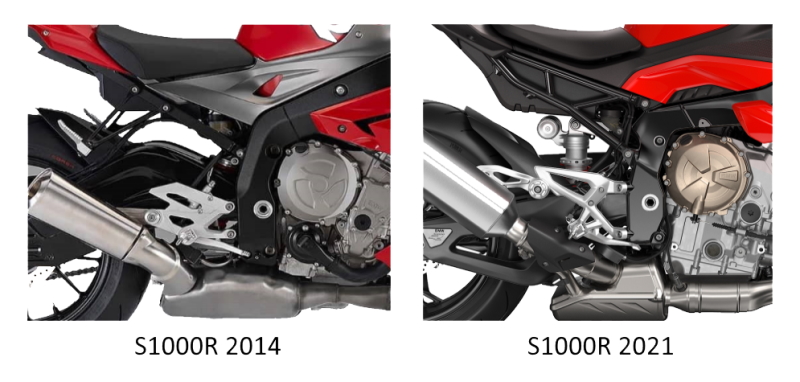
il monoammortizzatore grazie al cinematismo Full Floater Pro si trova ora molto più lontano dal pivot del forcellone e dal motore. Ciò impedisce che il calore sviluppato dal motore causi il surriscaldamento del monoammortizzatore e garantisce una maggiore stabilità della temperatura di esercizio e una risposta di smorzamento ancora più costante.
In effetti, a un confronto visivo tra la vecchia e la nuova versione balza all’occhio il forte arretramento del mono, che prima era praticamente occultato dal telaio nella vista laterale, mentre adesso spicca con evidenza.
Il sistema full floater come lo conoscevo io ha parecchi pregi, ma non sposta affatto l’ammortizzatore lontano dal motore. Dovevo assolutamente capire, perciò ho gugolato a fondo, ho scoperto parecchie cosette interessanti e ho deciso di farne quest’articolo. Buon divertimento.
Un po’ di storia
A partire dagli anni ’70 i costruttori di moto da cross si trovarono ad affrontare il problema di come rendere meno drammatici gli atterraggi dopo salti che, con il crescere delle potenze, stavano diventando tanto alti da sfasciare i telai – e anche i piloti. Era indispensabile innanzitutto aumentare l’escursione della ruota. La mossa più semplice sarebbe stata quella di adottare ammortizzatori più grandi e di irrobustire il telaio, ma l’aumento di peso sarebbe stato insostenibile.
Una soluzione venne dal sistema Yamaha Monocross, introdotto nel 1973, dove il forcellone era dotato di una grossa capriata superiore, cui era fissato un mono quasi orizzontale ancorato molto in avanti al trave superiore del telaio. Questo schema consentì di aumentare di parecchio l’escursione della sospensione posteriore a parità di corsa dell’ammortizzatore e di eliminare le sollecitazioni lungo buona parte del telaio, a vantaggio della leggerezza.
Sospensione Monocross della Yamaha YZ250 1980
Con l’ulteriore progresso delle prestazioni però divenne evidente la necessità di adottare cinematismi che consentissero di accrescere progressivamente e notevolmente la rigidità della sospensione all’aumentare della compressione. In questo modo sarebbe stato possibile ottenere moto che copiavano bene le sconnessioni, ma allo stesso tempo sopportavano bene gli atterraggi, trasmettendo le relative sollecitazioni al telaio in modo progressivamente crescente e non tutte in un colpo quando il mono andava a pacco. Fu così che, a cavallo del 1980, tutte le case impegnate nel cross si dotarono di sistemi progressivi, che presto vennero adottati anche sulle moto stradali. In particolare, divennero piuttosto noti, perché utilizzati come leva commerciale, i sistemi sviluppati dalle case giapponesi: lo Honda Pro-link, il Kawasaki Uni-trak, lo Yamaha Monoshock e il Suzuki Full Floater.
Il Full Floater Richardson-Suzuki
Il Full Floater è associato a Suzuki, ma questa in realtà aveva soffiato l’idea – se qualche lettore anglofono si vuole avventurare nella lettura del caso giudiziario, ecco il link – ad un appassionato motociclista americano, Don Richardson, che lo aveva progettato, realizzato e applicato alla propria moto da cross, per poi brevettarlo nel 1974, all’età di diciannove anni.
Suzuki, che da un po’ stava tentando di realizzare una sospensione del genere, aveva firmato con Richardson nel 1978 un’esclusiva per studiare il suo sistema e applicarlo alla produzione di serie nel caso si rivelasse fattibile. Il giovane quindi condivise tutte le informazioni che aveva e fornì anche diversi prototipi. Nel dicembre 1979 Suzuki comunicò la propria rinuncia, ma in realtà i suoi tecnici e collaudatori erano entusiasti, tanto è vero che depositò nell’ottobre del 1980 in Giappone un brevetto per uno schema praticamente uguale e cominciò a vendere modelli con questa sospensione nel 1981.
Richardson fece causa alla Casa Madre e alla sua sussidiaria negli USA e nel marzo 1987 la vinse, aggiudicandosi in primo grado il pagamento dei danni e una royalty di 50 centesimi di dollaro su ogni moto venduta negli USA, per violazione del brevetto, e di ben 12 dollari su ogni moto venduta nel mondo, per il furto di alcuni segreti commerciali non brevettabili per la realizzazione pratica del sistema. Considerando che Suzuki fino alla sentenza aveva venduto circa 1,5 milioni di moto con sospensione full floater, stiamo parlando di un ordine di grandezza sui 19 milioni di dollari.
A seguito dell’inevitabile ricorso in appello, Richardson ottenne ancora di più, anche se firmò un accordo con Suzuki per non rivelare la cifra finale. Forse non è solo per questioni tecniche che i giapponesi abbandonarono questo sistema alla fine degli anni ’80.
Da quest’articolo del Los Angeles Times, pubblicato dopo la sentenza, emerge inoltre che Richardson aveva già incassato denaro con accordi privati da Kawasaki e Yamaha, che pure avevano copiato in qualche misura il suo brevetto per i propri sistemi di sospensione progressiva. Sembra quindi che una bella fetta della corsa alla sospensione più efficiente a cavallo tra gli anni ’70 e ’80 sia dovuta al genio di un giovane californiano.
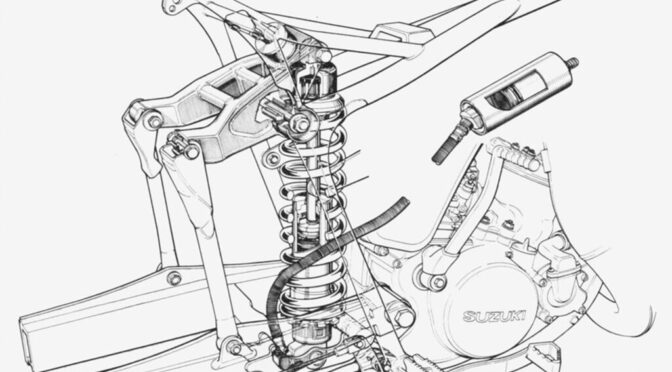
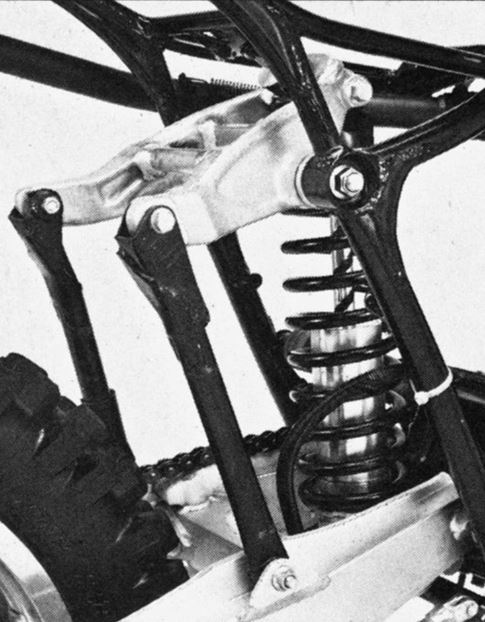
Lo schema Full Floater è basato su un normale forcellone bibraccio, collegato mediante due bielle alla parte posteriore di un bilanciere superiore, a sua volta infulcrato al telaio su un asse trasversale posto a metà della propria lunghezza. Il tutto quindi costituisce un quadrilatero deformabile. Il mono è ancorato al forcellone e all’estremità anteriore del bilanciere. Quando il forcellone si solleva, comprime la base del mono e solleva il bilanciere, la cui parte anteriore si abbassa, comprimendo a sua volta la testa del mono. La mancanza di qualsiasi collegamento tra il mono e il telaio rende questa sospensione completamente flottante, che appunto è il significato di “full floater”.
Sospensione Full Floater della Suzuki RM125 1981
Questo schema rende la sospensione progressiva e offre il vantaggio aggiuntivo che il telaio non è sollecitato direttamente dal mono, perché le forze gli vengono trasmesse attraverso il bilanciere, rendendo la marcia più confortevole.
Il Pro-Link Kawasaki
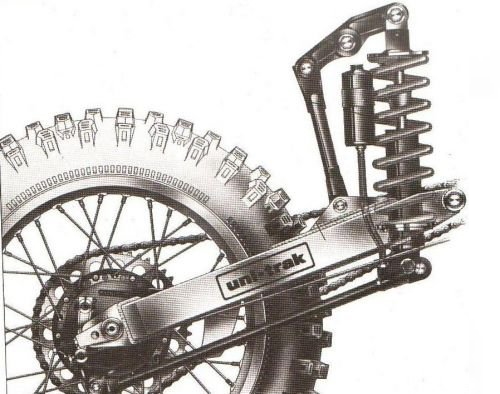
I vantaggi del sistema full floater erano evidenti, per cui anche altri costruttori si avventurarono in sistemi del genere. Il primo, già nel 1979, era stato Kawasaki con il sistema Uni-Trak. In realtà il nome indica una serie di sistemi full floater diversi. Il primo di essi è comunque una variazione dello schema Richardson, in quanto mantiene il bilanciere superiore, collegato al forcellone da una sola biella centrale, mentre il mono poggia non sul forcellone, bensì su un braccio inferiore parallelo ad esso e ancorato al telaio e al mozzo della ruota. Già solo a guardarlo, si capisce perché Richardson ottenne un accordo economico extragiudiziale anche con questa Casa.
Il primo sistema Kawasaki Uni-Trak
Lo Unit Pro-Link Honda
Honda aveva seguito una strada un po’ diversa dagli altri costruttori. Infatti, il suo sistema Pro-Link perseguiva sì la progressività dell’assorbimento, ma mirava anche a ridurre la lunghezza del mono, per aumentare la compattezza del sistema.
Lo schema Pro-Link originario non era un full floater, in quanto il mono era collegato superiormente al telaio. In basso invece esso era infulcrato alla parte anteriore di un elemento triangolare, a sua volta collegato posteriormente al forcellone e inferiormente, mediante una bielletta orizzontale, al telaio.
Il sistema Honda Pro-Link
Per inciso, questo sistema è usato tale e quale da diversi altri costruttori, tra cui BMW – sulla sua serie K frontemarcia – e Triumph.
Il successivo sistema Unit Pro-Link, tuttora in uso, è invece un full floater. Sviluppato sulla RC211V, questo schema fu trasferito alla produzione di serie sulla CBR600 del 2003. In pratica si tratta di un Pro-Link classico, con l’unica differenza che il mono è ancorato al forcellone e non più al telaio.
Il Full Floater Pro BMW
Come abbiano visto sopra, nella sospensione Full Floater Richardson il mono si trova nella posizione avanzata classica dei sistemi progressivi. Invece, nello schema BMW Full Floater Pro una biella laterale posta subito accanto al mono connette diagonalmente il forcellone alla parte anterioredel bilanciere, che quindi funziona al contrario ripetto allo schema tradizionale. Il mono di conseguenza è collegato alla parte posteriore del bilanciere, perciò può essere arretrato di una quota pari alla lunghezza dello stesso, ben lontano dal calore del motore.
Sospensione BMW Full Floater Pro.
L’ennesimo capolavoro della meccanica tedesca? Macchè. Gli ingegneri crucchi hanno ripreso lo schema funzionale della sospensione Ducati Soft Damp, usata negli anni ’80 e ’90 su parecchi modelli della Casa di Borgo Panigale – dalla Paso alla serie 916-996-998 – e sulle Cagiva equipaggiate con gli stessi motori. Con questa soluzione, Ducati risolse brillantemente il problema di realizzare una sospensione progressiva nel risicato spazio disponibile tra lo scarico del cilindro posteriore e la ruota.
Sospensione Soft Damp della Ducati 996
Quindi, un applauso a BMW per aver avuto la fantasia di ripescare dalla storia uno schema che ha effettivamente risolto il suo problema, ma per quanto riguarda il suffisso “Pro”, può restare tranquillamente nel cassetto della fuffa.
Questo articolo è il seguito della Parte 1 – Sterzata e spostamento laterale del corpo, dove sono descritti i modi per far curvare la moto. Qui invece vedremo che cosa succede alle traiettorie quando si accelera e si frena in curva.
Anche questa parte parte inizia con un capitolo in cui sono trattate le nozioni di dinamica della moto necessarie per comprendere i comportamenti descritti nel seguito.
Variazioni di velocità in curva
1 Dinamica
1.1 Trasferimenti di carico
1.1.1 In accelerazione
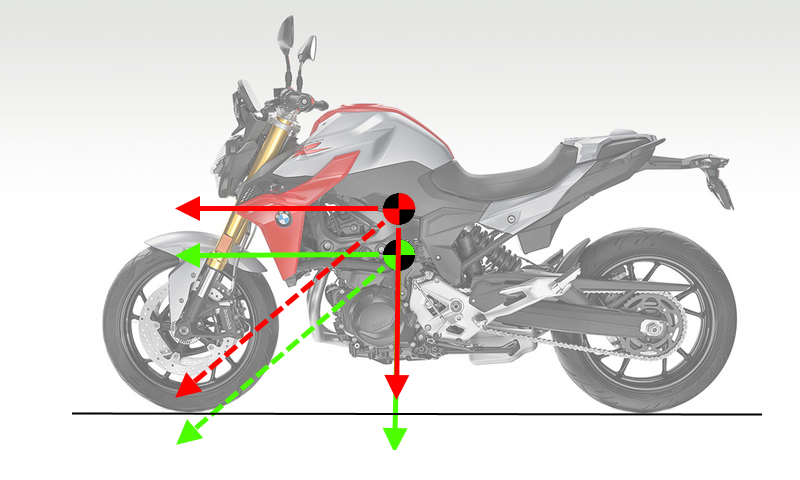
In accelerazione, la forza impressa contro l’asfalto dalla ruota posteriore e l’inerzia applicata sul baricentro determinano un trasferimento di carico dalla ruota anteriore a quella posteriore, reso evidente dal fatto che la moto cabra, cioè solleva la parte anteriore e abbassa quella posteriore.
Per chiarire meglio questo fatto, immaginate di appoggiare la moto su due bilance, una per ruota, e che a moto ferma entrambe le bilance segnino lo stesso peso. Se si potesse continuare a pesare la moto anche in accelerazione, accadrebbe che il peso, pur restando complessivamente uguale [1], si sposterebbe dalla ruota anteriore a quella posteriore all’aumentare dell’accelerazione.
Figura 1 – Trasferimento di carico in accelerazione
In conseguenza di quanto detto sopra, visto che tra i fattori che influiscono sull’aderenza vi è anche il carico gravante sullo pneumatico, l’aderenza disponibile alla ruota posteriore aumenta notevolmente, mentre diminuisce quella all’anteriore. Ciò consente di scaricare a terra una grande coppia motrice e quindi di accelerare molto rapidamente prima che la ruota motrice slitti.
Tutto ciò però avviene solo a patto che l’accelerata sia progressiva. Infatti, il trasferimento di carico non avviene istantaneamente, ma il suo completamento richiede qualche frazione di secondo, perché la sospensione e lo pneumatico posteriori devono avere il tempo di comprimersi. Un’azione troppo brusca sull’acceleratore, in caso di scarsa aderenza o di coppia motrice molto elevata, porterebbe lo pneumatico posteriore a superare il limite di aderenza prima che il trasferimento di carico eserciti il suo effetto e quindi a slittare.
Il sistema dicontrollo della trazione evita lo slittamento in accelerazione. Quelli più semplici intervengono tagliando la potenza in caso di slittamento, mentre i più raffinati sono collegati a piattaforme inerziali – strumenti di controllo dei movimenti della moto nello spazio – e intervengono in modo più o meno incisivo in base all’inclinazione della moto e ad altri parametri.
Oltre a quanto detto sopra, in accelerazione:
lo sterzo si alleggerisce
l’angolo di sterzo e l’avancorsa aumentano, rendendo la moto meno maneggevole.
1.1.2 In frenata
In frenata la forza frenante impressa contro l’asfalto dalle due ruote determina un trasferimento di carico dalla ruota posteriore a quella anteriore, con la moto che picchia, cioè affonda la parte anteriore e solleva quella posteriore.
Figura 2 – Trasferimento di carico in frenata
Di conseguenza, l’aderenza disponibile all’anteriore aumenta notevolmente e quella disponibile al posteriore diminuisce nella stessa misura, perciò è possibile frenare in modo molto più incisivo davanti che dietro. È per questo che i freni anteriori sono di solito molto più potenti di quelli posteriori.
Anche in questo caso è essenziale che l’azione sul freno anteriore sia progressiva, per consentire alla sospensione e allo pneumatico anteriori di comprimersi e realizzare compiutamente il trasferimento di carico. Se invece l’azione sul freno anteriore fosse brusca, il trasferimento di carico non avrebbe il tempo di esplicare i suoi effetti positivi sull’aderenza e quindi la ruota anteriore arriverebbe prematuramente al bloccaggio, con conseguente caduta, a meno di non rilasciare immediatamente il freno mantenendo lo sterzo rigorosamente in linea con la traiettoria.
L’ABS impedisce il bloccaggio delle ruote e quindi la conseguente sbandata. Nelle versioni dotate di funzione cornering esso agisce anche molto prima del bloccaggio al fine di rendere la frenata più progressiva e rendere più dolci le variazioni di assetto in curva.
Oltre a quanto detto sopra, in frenata:
la compressione della sospensione anteriore peggiora notevolmente l’assorbimento delle sconnessioni
l’angolo di sterzo e l’avancorsa diminuiscono, rendendo la moto più maneggevole e favorendo l’inserimento in curva.
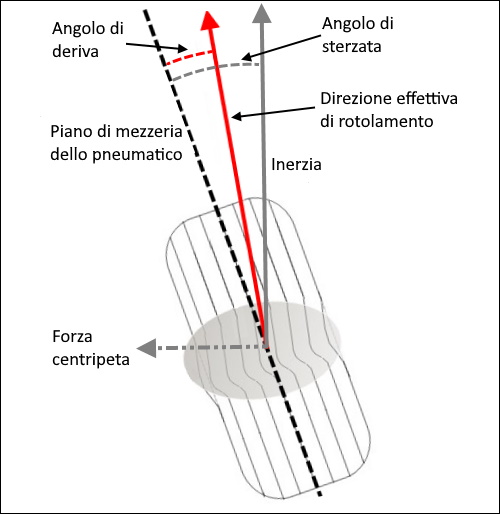
1.2 Deriva
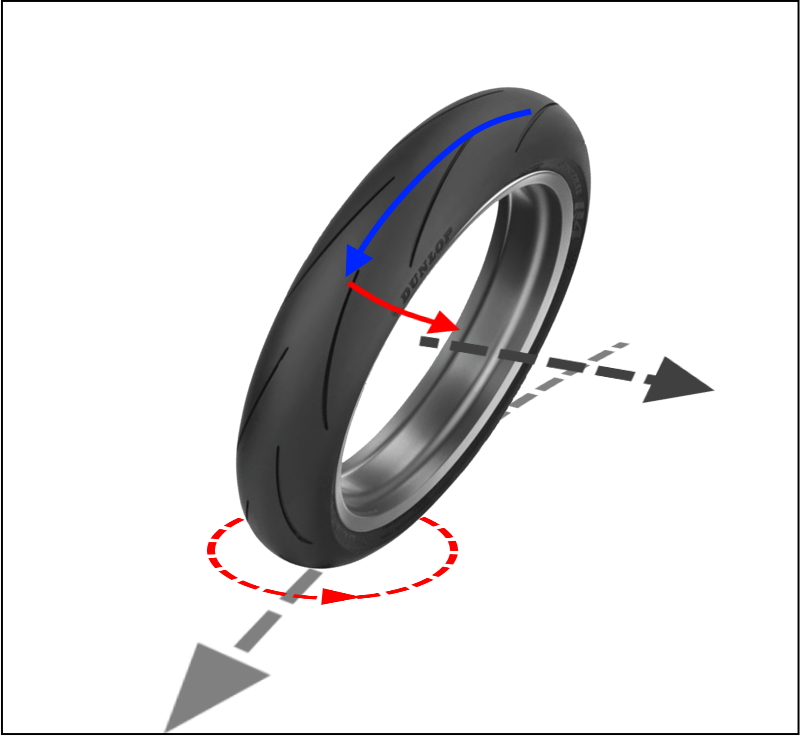
Quando si percorre una curva, il battistrada è deformato dalla forza centripeta generata dal contatto con l’asfalto, perciò la ruota percorre una traiettoria un po’ più larga rispetto a quella che dovrebbe essere se il battistrada fosse perfettamente rigido. Questo fenomeno si chiama deriva e l’angolo tra la traiettoria teorica – cioè la direzione del piano di mezzeria della ruota – e quella reale percorsa dalla ruota è detta angolo di deriva.
Figura 3 – Deriva dello pneumatico
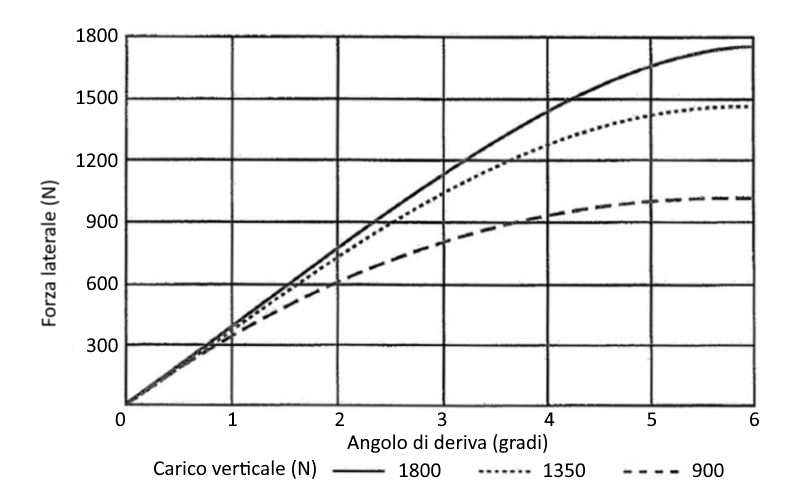
L’angolo di deriva di ciascuna ruota aumenta:
all’aumentare delle forze laterali
al diminuire del carico.
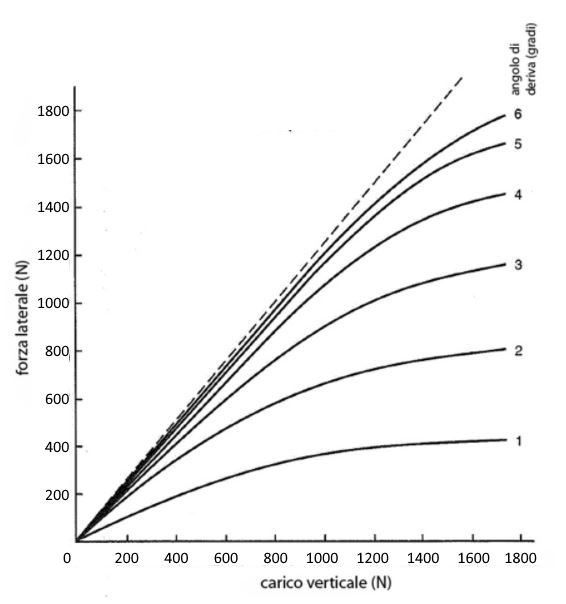
I grafici seguenti illustrano le relazioni fra forza laterale, carico e deriva con uno pneumatico standard, vale la pena di osservarli attentamente e di meditarci sopra.
Figura 4 – Relazione tra forza laterale e angolo di deriva, per diversi carichi
Figura 5 – Relazione tra forza laterale e carico, per diversi angoli di deriva
Si noti che in curva anchele forze longitudinali influiscono sulla deriva delle ruote, in quanto comprendono una componente laterale dovuta alla traiettoria curva.
In pratica, la deriva in curva si comporta nei vari casi come segue:
maggiore è la velocità a parità di raggio della traiettoria, cioè maggiore è l’angolo di inclinazione del sistema moto + pilota, più la deriva aumenta (aumenta la forza laterale ma non il carico)
più il carico si trasferisce dinamicamente su una ruota, più la sua deriva diminuisce (aumenta il carico, ma non la forza laterale)
più si applica forza frenante o accelerante a una ruota, più la sua deriva aumenta (la forza è diretta longitudinalmente rispetto allo pneumatico, ma la sua componente trasversale dovuta alla traiettoria curva aumenta la forza laterale)
1.3 Momenti imbardanti dovuti alle variazioni di velocità
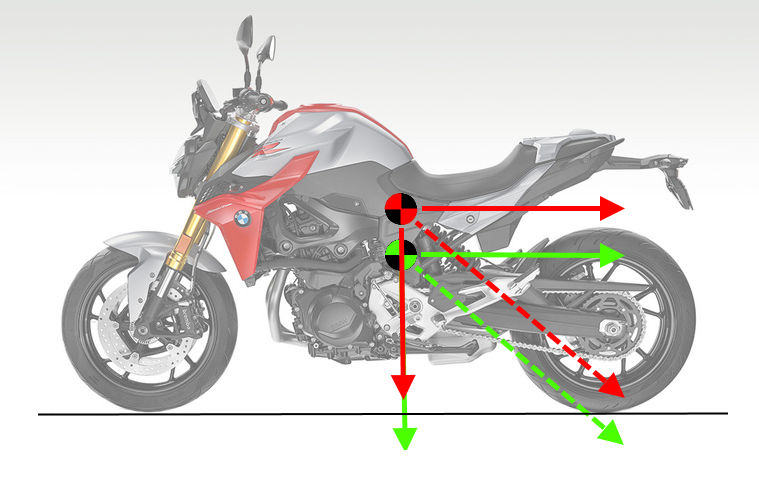
Come abbiamo visto nel paragrafo 1.5.2 della Parte 1 di questo articolo, durante la percorrenza della curva, le ruote percorrono una traiettoria più esterna rispetto a quella del baricentro. Per tale ragione, ogni variazione della velocità impressa alle ruote con il gas e i freni determina un momento imbardante che si somma o si sottrae a quello autoraddrizzante naturalmente presente in curva. In particolare:
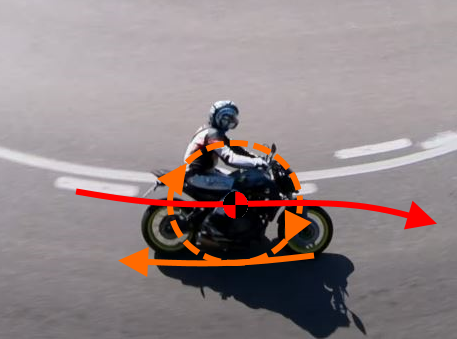
una decelerazione aumenta il momento imbardante ad allargare, cioè spinge la moto ad andare ancora più dritta.
Figura 6 – Momento imbardante ad allargare
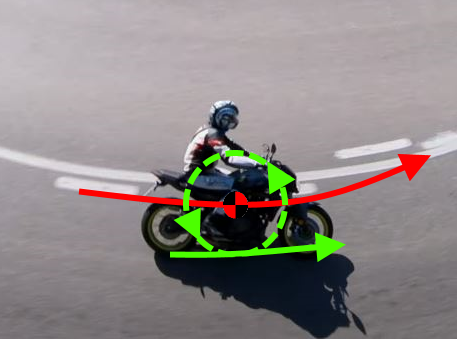
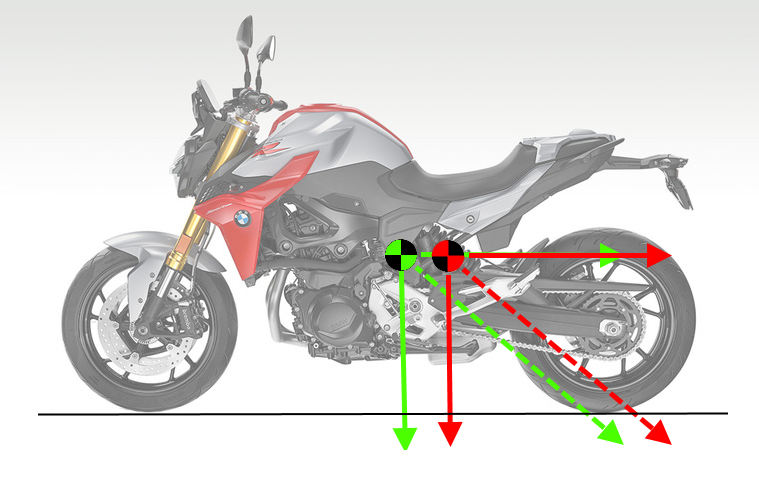
un’accelerazione aggiunge un momento imbardante a stringere, cioè riduce la tendenza della moto ad andare dritta e, se il baricentro è alto, può addirittura arrivare a spingerla a chiudere la curva.
Figura 7 – Momento imbardante a stringere
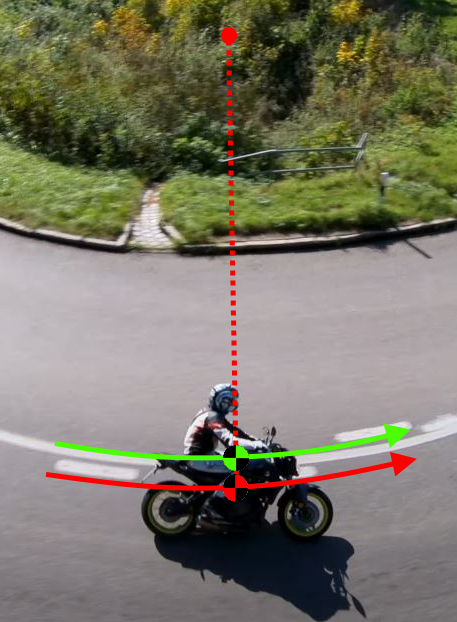
Questa è la ragione per cui nelle gare si vedono moto che escono in impennata dalle curve senza partire per la tangente.
Figura 8 – Impennata in curva in accelerazione
1.4 Effetti della diversa posizione del baricentro
La posizione del baricentro influenza profondamente il comportamento della moto.
1.4.1 Variazione della posizione longitudinale
Quando il baricentro si trova sulla verticale del centro dell’interasse, il carico statico (cioè il peso da fermo) della moto grava in misura uguale su entrambe le ruote. Via via che il baricentro viene spostato in avanti, aumenta il carico statico sulla ruota anteriore e diminuisce corrispondentemente quello sulla ruota posteriore, e viceversa.
A parità di altezza del baricentro, una moto con il baricentro avanzato:
ha più aderenza usando il freno anteriore, anche sui fondi scivolosi
impenna con maggior difficoltà
ha meno trazione in accelerazione
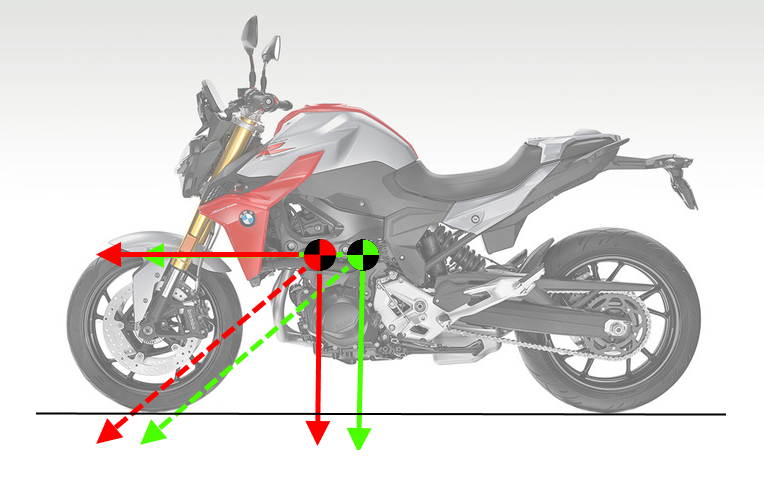
si ribalta in avanti più facilmente.
Figura 9 – Baricentro avanzato e ribaltamento in frenata
Una moto con il baricentro arretrato invece:
ha più trazione in accelerazione, anche sui fondi scivolosi
si ribalta in avanti con maggior difficoltà
ha meno aderenza usando il freno anteriore
impenna più facilmente.
Figura 10 – Baricentro arretrato e ribaltamento in accelerazioneIl pilota può modificare entro certi limiti a proprio vantaggio la posizione longitudinale del baricentro del sistema, per esempio spostandosi in avanti nelle forti accelerazioni e indietro nelle frenate decise, in modo da allontanare il limite di ribaltamento, oppure spostandosi indietro nelle forti accelerazioni, se è un amante delle impennate.
1.4.2 Variazione dell’altezza
In generale, una moto con il baricentro alto è più reattiva e maneggevole di una col baricentro basso, in quanto:
ha più trazione in accelerazione, perché il trasferimento di peso sulla ruota posteriore avviene più rapidamente
ha più aderenza usando il freno anteriore, perché il trasferimento di peso sulla ruota anteriore avviene più rapidamente
Figura 11 – Altezza baricentro e reattività alle accelerazioni
è soggetta a una minor forza centrifuga a parità di velocità di percorrenza (cioè di velocità angolare) e raggio della traiettoria seguita dalle ruote, perché il baricentro percorre una traiettoria più vicina al centro geometrico della curva.
Figura 14 – Altezza del baricentro in curva
Tutte i vantaggi descritti sopra rendono la moto con il baricentro alto particolarmente efficace nel misto stretto e negli slalom, perché:
la moto deve rollare per un angolo minore per passare da curva a controcurva
il baricentro segue una traiettoria più interna, con minor forza centrifuga da vincere
la moto chiude meglio la curva in accelerazione, grazie al maggior momento imbardante dovuto all’aumentata distanza tra la traiettoria della ruota posteriore e il baricentro.
Per contro, la stessa moto:
è limitata nell’accelerazione massima dal fatto che impenna più facilmente
Figura 15 – Altezza baricentro e ribaltamento in accelerazione
è limitata nella frenata al limite dal fatto che si ribalta in avanti più facilmente
Figura 16 – Altezza baricentro e ribaltamento in frenata
tende ad allargare di più la traiettoria in frenata, a causa del maggior momento imbardante dovuto all’aumentata distanza tra le traiettorie delle ruote e il baricentro.
Ho evitato finora di parlare della velocità di rollio, perché gli effetti della variazione di altezza del baricentro sono complessi. È vero che il baricentro alto aumenta l’inerzia e quindi riduce la velocità di rollio, ma è altrettanto vero che, a causa dello spessore degli pneumatici, una moto con il baricentro alto:
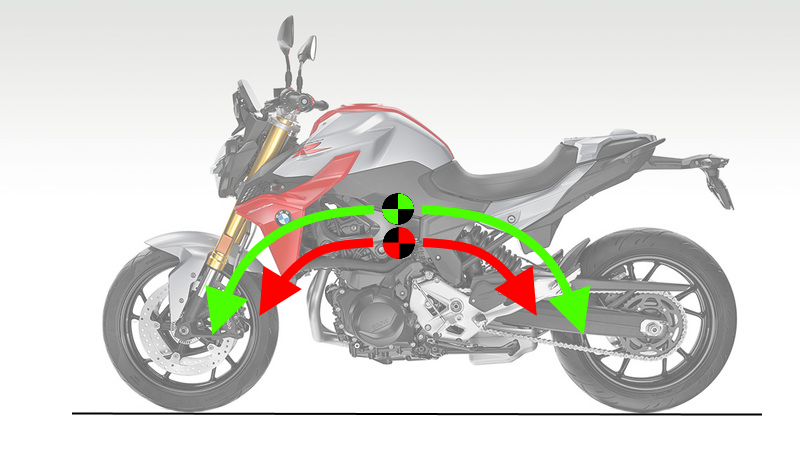
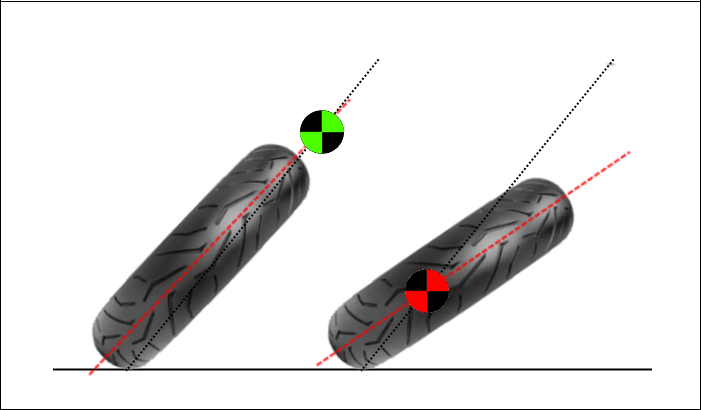
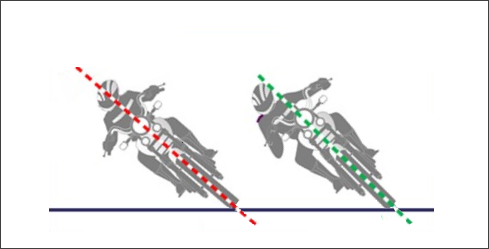
si deve inclinare di meno in curva a causa della larghezza degli pneumatici e questo riduce il tempo necessario per rollare da curva a controcurva. Il fenomeno è illustrato nella figura che segue:
Figura 12 – Altezza del baricentro e angolo di piega
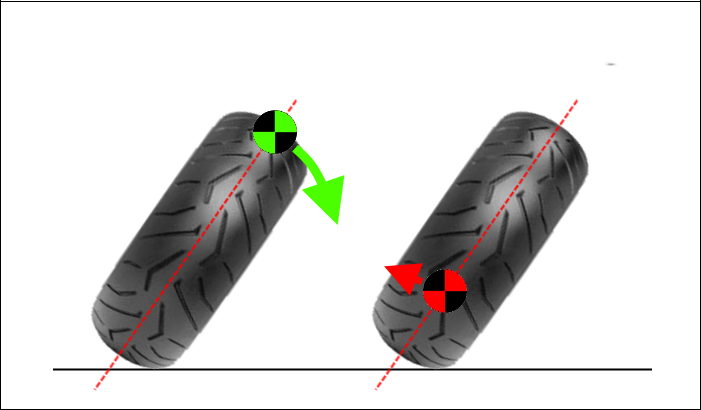
è facilitata nell’inserimento in curva dal fatto che il baricentro si sposta di lato più rapidamente all’inclinarsi della moto e perciò vince più facilmente la resistenza creata dallo spostamento verso l’interno del punto di contatto dello pneumatico a terra dovuto alla larghezza di questo – se il baricentro è molto basso e la ruota posteriore è molto larga e piatta, può addirittura diventare difficile o impossibile inclinare la moto [2], come nell’esempio a destra della figura che segue:
Figura 13 – Altezza del baricentro e velocità di rollio
1.4.3 Variazione della posizione laterale
Il baricentro della moto si trova di solito nel piano di mezzeria della stessa [3]. Il pilota invece può spostarsi lateralmente e quindi modificare la posizione del baricentro del sistema moto + pilota per variare l’inclinazione e modificare la traiettoria, come abbiamo visto nella Parte 1 di questo articolo.
1.5 Sospensioni
Le sospensioni sono studiate con cura in sede di progetto per assicurare il miglior compromesso tra tenuta di strada e confort in rapporto all’uso per il quale la moto è destinata.
Sull’argomento si potrebbero scrivere libri, qui di seguito ci limiteremo a vedere le nozioni più importanti ai fini del controllo della moto in curva.
I parametri importanti delle sospensioni sono:
l’escursione – o corsa – cioè la distanza che le ruote percorrono tra la massima compressione e la massima estensione
la rigidità, cioè la forza con cui resistono alla compressione.
Sospensioni morbide e a corsa lunga:
favoriscono l’assorbimento delle sconnessioni
evitano le perdite di aderenza delle ruote sullo sconnesso
Sospensioni rigide e a corsa corta:
riducono le oscillazioni e quindi l’inerzia delle masse sospese – cioè di tutto quello che sta sopra alle molle delle sospensioni: telaio, motore, persone, bagagli ecc.
diminuiscono la compressione delle sospensioni in piega dovuta alla forza centrifuga, massimizzando l’angolo di inclinazione possibile.
Figura 17 – Compressione delle sospensioni in curva
1.5.1 Escursione
L’escursione delle sospensioni è decisa dal progettista e non può essere modificata dal pilota. In linea di massima, a moto ferma e pilota di peso standard a bordo, le sospensioni risultano compresse per circa un terzo della loro escursione, in modo da potersi comprimere per altri due terzi o estendersi per un terzo in base ai trasferimenti di carico e alle sconnessioni della strada. Piloti più leggeri o pesanti della media richiedono la regolazione delprecarico delle molle (e in casi estremi la loro sostituzione con altre più adatte) per compensare la variazione di peso e mantenere l’assetto conforme al progetto, e un adattamento ancora maggiore è richiesto quando si trasportano passeggero e bagagli. Perciò è indispensabile regolare almeno la sospensione posteriore – quella che sopporta la maggior parte del carico aggiuntivo – ogni volta che si cambia configurazione.
Mantenere un precarico insufficientepeggiora notevolmente il comportamento della moto sotto vari i punti di vista:
peggiora nettamente l’assorbimento delle sconnessioni
lo sterzo diventa:
meno preciso
meno rapido
più pesante
diminuisce la luce a terra in curva.
Ciò vale anche per i corti di gamba che riduconoil precarico della sospensione posteriore per abbassare l’altezza della sella: è un errore da evitare. Se non toccate terra sulla moto dei vostri sogni:
adottate una sella più bassa
se ciò non basta, acquistate la versione ribassata del modello, se disponibile
se tale versione non è disponibile, cambiate i vostri sogni.
1.5.2 Rigidità
La rigidità della sospensione dipende dalla molla, che può essere più o meno rigida, e dall’ammortizzatore, che può essere più o meno frenato. Contrariamente a quanto molti credono, la regolazione del precarico non ha alcuna influenza sulla rigidità della sospensione, anche se essa può influenzare in peggio la capacità di assorbire le sconnessioni, se il precarico è eccessivo o troppo basso, perché la sospensione raggiunge più facilmente il fondo corsa in estensione o in compressione.
Sulle sospensioni più economiche, la rigidità non è regolabile e molla ed ammortizzatore sono scelti in base all’uso per cui la moto è progettata. Salendo di livello diventano disponibili regolazioni della frenatura idraulica dell’ammortizzatore più o meno sofisticate e ampie, in modo da cucirsi addosso l’assetto su misura o, più di frequente, combinare disastri dovuti all’incompetenza.
Le moto più sofisticate offrono sospensioni a controllo elettronico che adattano il proprio comportamento alle condizioni del fondo stradale e in base alle scelte effettuate dal pilota durante la guida.
1.5.3 Sospensioni pro-dive e anti-dive
La forcella tradizionale è inclinata in modo tale che quando essa si comprime, l’asse della ruota arretra; per tale ragione, l’uso del freno anteriore la fa comprimere più di quanto sia necessario a causa del trasferimento di carico. In altre parole, la forcellaha un comportamento pro-dive, tanto maggiore, quanto maggiore è il suo angolo rispetto alla verticale.
Figura 18 – Arretramento del perno ruota su una forcella tradizionale
Le sospensioni anti-dive evitano questo effetto grazie alla propria geometria, che rende pressoché verticale il movimento del perno ruota durante la compressione. In questo modo la forza frenante applicata alla ruota non influisce sull’affondamento, che è dovuto soltanto al trasferimento di carico.
Figura 19 – Comportamento del perno ruota con la sospensione Telelever
I vantaggi di questo tipo di sospensione sono:
una maggior capacità di assorbimento delle sconnessioni dovuta all’adozione di molle e ammortizzatori più morbidi rispetto a quelli necessari con le forcelle tradizionali
un aumento del comfort dovuto all’assetto piatto in frenata
una maggior stabilità in frenata, dovuta al mancato accorciamento dell’interasse
una ridotta tendenza a bloccare la ruota anteriore in frenata, grazie al minor tempo necessario per ottenere il trasferimento di carico sull’anteriore.
Per contro, una sospensione anti-dive mantiene il baricentro della moto più alto in frenata rispetto a una tradizionale, ma il conseguente maggior rischio di ribaltamento è mitigato dal fatto che l’interasse non si accorcia.
Sospensioni di questo genere sono piuttosto rare ed equipaggiano soltanto alcuni modelli di gamma alta della BMW e la versione più recente della Honda Gold Wing.
Figura 20 – Sospensione anteriore anti-dive della Honda Gold Wing 2018
1.6 Momento sterzante dovuto alla frenata anteriore
A moto inclinata, il punto di contatto di una ruota a terra si sposta verso l’interno della curva, mentre l’asse di sterzo giace sempre nel piano di simmetria della moto. Per tale ragione, una frenata anteriore genera un momento che tende a chiudere lo sterzo e quindi a sbilanciare la moto verso l’esterno, allargando la traiettoria.
Figura 21 – Momento sterzante indotto dal freno anteriore
Questo effetto può variare molto, da quasi nullo a decisamente evidente, ed aumenta se la ruota anteriore è larga, se il battistrada ha un profilo turistico (non a V) o se esso è spiattellato (usurato al centro) dall’uso in autostrada, perché in tali casi aumenta lo spostamento del punto di contatto a moto inclinata e quindi il braccio di leva tra questo e l’asse di sterzo.
2 Gestire la traiettoria con la variazione della velocità
Abbiamo visto nella Parte I di questo articolo che lo sterzo e lo spostamento del corpo del pilota consentono di inclinare e quindi far deviare la moto in qualsiasi situazione della guida, sia in rettilineo che a curva già impostata.
Freni e gas non consentono di impostare una curva, in quanto a sterzo e moto dritti ogni loro effetto si esplica nel piano verticale di simmetria della moto [4], però a moto inclinata hanno effetti sulla sua traiettoria e quindi possono essere usati a tale scopo.
Le variazioni di velocità in curva influiscono sull’inerzia della moto, sui carichi gravanti sulle ruote, sulle derive degli pneumatici e sulla direzione dello sterzo, perciò l’analisi dei loro effetti sul comportamento della moto deve tenere conto contemporaneamente di tutti questi aspetti.
Inoltre, gli effetti prodotti variazioni nella direzione degli pneumatici sulla traiettoria della moto in curva sono più complessi da analizzare che sulle auto, in quanto bisogna tenere presente che:
ogni variazione nella direzione delle ruote non genera solo una variazione della traiettoria, ma anche una variazione dell’inclinazione e questo, come abbiamo visto nel paragrafo 1.4 della Parte I, influenza a sua volta la traiettoria
ciascuna manovra produce effetti contrastanti fra loro, perciò il risultato complessivo può andare in una direzione o in quella opposta, secondo quali effetti prevalgono
finché non si raggiunge il limite di aderenza, la traiettoria della moto è determinata dalle sue variazioni di inclinazione conseguenti alle variazioni nella direzione delle ruote, mentre all’approssimarsi del limite di aderenza, gli pneumatici non riescono più a stringere la traiettoria, che quindi in questi casiè decisa dalle derive e dalla forza centrifuga.
Facciamo l’esempio di un aumento della deriva della ruota anteriore, che quindi punterà più verso l’esterno della curva:
finché c’è aderenza, ciò sbilancerà la moto verso l’interno e quindi essa stringerà la traiettoria
una volta raggiunto il limite, la moto non riuscirà a stringere la traiettoria, anzi, la allargherà, perché l’avantreno scivolerà verso l’esterno, e insistendo, perderà l’aderenza e la moto finirà in una caduta low-side (cioè con il pilota sul lato interno della curva).
Nei prossimi paragrafi vedremo che cosa accade nei diversi casi, tenendo sempre presente che quando una moto curva, essa è sempre soggetta agli effetti autoraddrizzanti descritti nel paragrafo 1.5. della Parte 1.
2.1 Accelerazione
L’accelerazione della ruota posteriore causa i seguenti effetti sull’assetto della moto:
sottrae aderenza disponibile alla ruota posteriore
induce un momento imbardante che tende a far stringere la traiettoria
aumenta la forza centrifuga, con tendenza ad allargare la traiettoria
induce un trasferimento di carico dalla ruota anteriore a quella posteriore, che determina:
l’estensione della forcella, con conseguente riduzione della maneggevolezza
l’aumento della deriva della ruota anteriore
la diminuzione della deriva della ruota posteriore
la componente laterale della forza accelerante impressa alla ruota posteriore ne aumenta la deriva, in contrasto con quanto visto al punto precedente, tanto più, quanto maggiore è l’accelerazione.
L’effetto complessivo risultante sulla traiettoria dipende:
dalla forza dell’accelerazione
dalla posizione del baricentro
dall’avvicinamento al limite di aderenza.
se l’accelerazione è lieve, lo sbilanciamento verso l’interno dovuto al gioco delle derive compensa il momento raddrizzante dovuto all’inerzia e la moto tende a mantenere la traiettoria impostata
all’aumentare dell’accelerazione, l’effetto complessivo dipende dalla posizione del baricentro della moto:
con un baricentro alto, prevale l’effetto imbardante a stringere e la moto continua a mantenere la traiettoria impostata senza alcuna difficoltà
con un baricentro basso, l’effetto imbardante a stringere non prevale e la moto tende ad andare dritta
se l’accelerazione è eccessiva, la ruota posteriore supera il proprio limite di aderenzae derapa verso l’esterno e:
se il pilota riesce a controsterzare e a modulare l’accelerazione, controlla la sbandata
se il pilota non riesce, la moto cade in low-side avvitandosi verso l’interno
se il pilota chiude il gas, la ruota posteriore riacquista bruscamente aderenza a moto sbandata, sbilanciandola con violenza verso l’esterno (high-side).
2.2 Frenata anteriore
2.2.1 Effetti sull’assetto
La frenata della ruota anteriore causa i seguenti effetti sull’assetto della moto:
sottrae aderenza disponibile alla ruota anteriore
induce un momento imbardante che tende a far allargare la traiettoria
riduce notevolmente la forza centrifuga, con tendenza a stringere la traiettoria
induce un trasferimento di carico dalla ruota posteriore a quella anteriore, che determina:
la compressione della forcella, con conseguente aumento della maneggevolezza
la diminuzione della deriva della ruota anteriore
l’aumento della deriva della ruota posteriore
la componente trasversale della forza frenante dovuta alla traiettoria curva aumenta la deriva della ruota anteriore, in contrasto con quanto visto al punto precedente, tanto più, quanto più forte è la frenata
determina un ulteriore affondamento della sospensione anteriore, se questa è pro-dive (forcella normale)
induce un momento sterzante a chiudere che tende a raddrizzare la moto, allargando la traiettoria
L’effetto complessivo risultante sulla traiettoriadipende:
dalla forza della frenata
dalle caratteristiche dello pneumatico anteriore
dalla posizione del baricentro
dall’avvicinamento al limite di aderenza
In pratica, i casi possibili sono i seguenti:
se lo pneumatico anteriore è largo e/o il suo battistrada ha un profilo turistico e/o è spiattellato, il momento sterzante diventa particolarmente evidente e la moto tende ad allargare la traiettoria, tanto più quanto più forte è la frenata – si noti che questo effetto influisce solo sulla forza esercitata dal manubrio sulle mani e non anche sulla tenuta di strada, per cui basta contrastarlo per mantenere la traiettoria
all’aumentare della frenata, aumenta il momento imbardante ad allargare la traiettoria, tanto più, quanto più il baricentro è alto
se la frenata è eccessiva, la ruota anteriore supera il proprio limite di aderenza, lo sterzo si chiude e la moto cade in low-side.
Si noti che con il freno anteriore è impossibile causare una caduta high-side, cosa invece sempre possibile in caso di errore nell’uso del gas e del freno posteriore, ovviamente in assenza di aiuti elettronici.
2.2.2 Quando si usa
Se l’effetto di chiusura dello sterzo presente sulla moto è elevato, l’uso del freno anteriore da solo può diventare controproducente, perché la moto raddrizza la traiettoria in modo eccessivo.
Se invece tale effetto è ridotto, l’uso del freno anteriore consente decelerazioni notevoli in curva e quindi permette di stringere la traiettoria efficacemente, almeno finché non ci si avvicina al limite dell’aderenza, allorché gli effetti sottosterzanti prevalgono e la moto allarga con sempre maggior decisione la traiettoria.
2.3 Frenata posteriore
2.3.1 Effetti sull’assetto
La frenata della ruota posteriore è molto più blanda di quella anteriore e quindi influisce assai meno sull’assetto. Tenendo presente tale premessa, essa causa i seguenti effetti sull’assetto della moto:
sottrae aderenza disponibile alla ruota posteriore
riduce sensibilmente la forza centrifuga, aumentando la tendenza a stringere la traiettoria
induce un momento imbardante che tende a far allargare la traiettoria – più lieve di quello indotto dalla frenata anteriore, vista la traiettoria più stretta percorsa dalla ruota posteriore
induce un trasferimento di carico dalla ruota posteriore a quella anteriore – più lieve di quello indotto dalla frenata anteriore, vista la minor decelerazione possibile – che determina:
una compressione della forcella trascurabile, perché essa è tirata indietro dal freno posteriore anziché essere compressa dall’effetto pro-dive indotto dalla frenata anteriore
la diminuzione della deriva della ruota anteriore
l’aumento della deriva della ruota posteriore
la componente trasversale della forza frenante dovuta alla traiettoria curva – più lieve di quella generata dalla frenata anteriore, vista la minor decelerazione possibile – aumenta ulteriormente la deriva della ruota posteriore, tanto più, quanto più forte è la frenata.
L’effetto complessivo risultante sulla traiettoriaè che la moto:
tende in qualsiasi circostanza a mantenere la traiettoria impostata
se la frenata è eccessiva, la ruota posteriore supera il proprio limite di aderenza, derapa verso l’esterno e:
se il pilota è bravo a controsterzare e a modulare la frenata, controlla la sbandata
se il pilota tiene il freno premuto, la moto cade in low-side avvitandosi verso l’interno
se il pilota molla il freno posteriore di scatto, la ruota posteriore riacquista bruscamente aderenza a moto sbandata, sbilanciandola con violenza verso l’esterno (caduta high-side).
2.3.2 Quando si usa
Il freno posteriore consente decelerazioni più blande rispetto a quello anteriore, ma non genera effetti negativi sulla traiettoria – almeno finché non si supera il limite di aderenza – né sullo sterzo né sulla compressione della forcella. Quindi esso è un ottimo strumento per correzioni di entità limitata, come:
stringere la traiettoria in caso di curva presa un po’ troppo velocemente
adattare la traiettoria nelle curve a stringere
non allargare la traiettoria nelle curve in discesa.
2.3.3 Freno posteriore o chiusura del gas?
Gli effetti dinamici prodotti dai due comandi sono gli stessi, ma il freno è più semplice e preciso da usare rispetto alla chiusura del gas, perché:
ha un comportamento costante e prevedibile, mentre l’effetto di una chiusura del gas varia moltissimo in base al rapporto inserito, al regime e al tipo di motore
consente di rallentare senza chiudere il gas, evitando ogni effetto on-off.
2.4 Frenata integrale
2.4.1 Effetti sull’assetto
La frenata integrale causa i seguenti effetti sull’assetto della moto:
sottrae aderenza disponibile ad entrambe le ruote, ma in misura minore su ciascuna di esse a parità di decelerazione rispetto alla frenata su una sola ruota
riduce notevolmente la forza centrifuga, aumentando la tendenza a stringere la traiettoria
induce un momento imbardante che tende a far allargare la traiettoria, ma in misura minore rispetto alla sola frenata anteriore a parità di decelerazione, perché la ruota posteriore percorre una traiettoria più stretta rispetto a quella anteriore
rispetto alla frenata anteriore determina un momento sterzante nettamente ridotto, perché a parità di decelerazione la frenata anteriore ha un effetto minore sulla sterzata, mentre la frenata posteriore fa decelerare anche l’asse di sterzo, riducendo l’effetto
induce un trasferimento di carico dalla ruota posteriore a quella anteriore, che determina:
la compressione della forcella minore che nel caso della sola frenata anteriore
la diminuzione della deriva della ruota anteriore
l’aumento della deriva della ruota posteriore
la componente trasversale della forza frenante dovuta alla traiettoria curva aumenta la deriva di entrambe le ruote e in particolare di quella anteriore
nel complesso, gli effetti sulle derive non influiscono sensibilmente sulla traiettoria.
L’effetto complessivo risultante sulla traiettoriaè che la moto:
tende in qualsiasi circostanza a mantenere la traiettoria impostata
se la frenata è eccessiva – cosa piuttosto difficile, visto che la decelerazione ottenibile prima di superare il limite di aderenza è piuttosto elevata – tende a partire per la tangente sulle due ruote e quindi consente il recupero semplicemente riducendo la frenata.
2.4.2 Quando si usa
L’uso combinato dei due freni in curva è sempre possibile ed è nel complesso assai più efficace rispetto agli altri modi di frenare, perché:
presenta in misura assai minore l’effetto negativo sulla sterzata possibile con sola la frenata anteriore
consente decelerazioni assai maggiori senza mettere in crisi l’aderenza rispetto alla sola frenata posteriore
riduce l’affondamento della sospensione anteriore, migliorando la frenata sullo sconnesso e rendendo la guida più comoda, specialmente per il passeggero.
Ecco perché alcune moto sono equipaggiate con sistemi di frenata integrale.
l’unico caso in cui può convenire usare il solo freno anteriore è l’ingresso in curva nella guida sportiva, perché la maggior compressione della forcella aumenta la rapidità di ingresso in curva, a patto che la moto non soffra di un eccessivo momento raddrizzante dello sterzo.
[1] Se la strada è pianeggiante. Sui dossi il peso totale diminuirebbe e sulle cunette aumenterebbe. ⇑[2] Questo fatto si verifica normalmente sui dragster, che hanno baricentro bassissimo e gomma posteriore molto larga e squadrata. ⇑[3] Una eccezione famosa è costituita dalle Vespa con cambio meccanico, sempre sbilanciate a sinistra per compensare il peso del motore posto a destra della ruota posteriore. ⇑[4] Fanno eccezione alcune moto con albero motore longitudinale, come le vecchie BMW con motore boxer e le Moto Guzzi, dove le variazioni di regime del motore influiscono sensibilmente sull’inclinazione della moto. ⇑
La parte I di quest’articolo, pubblicata originariamente il 17 luglio 2021, è stata modificata il 10 luglio 2022 e nuovamente rielaborata tra il 17 e il 19 luglio dello stesso anno. Tra queste date ho acquisito maggior consapevolezza di alcuni aspetti della dinamica della moto, che mi hanno permesso di rendere più chiara, semplice e precisa sua la descrizione e di eliminare alcuni errori che avevo commesso nell’interpretare certi fenomeni.
Ringrazio Federico Canegiallo (https://www.giornalemotori.com/) per tutte le spiegazioni che ha avuto la pazienza di darmi e spero che questo mio scritto sia ora inattaccabile ai suoi occhi. 🙂
Premessa
Questo articolo ha lo scopo di descrivere il comportamento della moto in curva su strada e i modi che abbiamo per modificarlo. È più approfondito del solito e quindi è molto lungo. Per renderlo più digeribile, l’ho diviso in due parti:
Parte 1 – Sterzata e spostamento laterale del corpo
Ogni parte inizia con un capitolo in cui sono trattate le nozioni di dinamica della moto necessarie per comprendere i comportamenti descritti nel seguito. L’argomento non è trattato da un punto di vista matematico, ma solo qualitativo, perciò è comprensibile da chiunque, purché abbia tempo e voglia di leggere e capire.
Ho deciso di descrivere come si fanno le curve in moto, perché il web è pieno di articoli e di video su questo argomento, ma che in gran parte contengono errori. I peggiori poi sono vere e proprie schifezze, in cui si raccontano frescacce del tutto prive di senso, magari da gente che non sa assolutamente niente di dinamica della moto e lo ammette anche pubblicamente, con frasi tipo “io non ho la più pallida idea del perché avvenga questo, ma è così, prendetelo come un dogma”.
Leggendo i commenti a tali video, si trovano persone che li criticano, ma anche tante altre che ringraziano l’autore per avergli chiarito i loro dubbi… Questi motociclisti meritano di più, sono appassionati in cerca di risposte alle proprie domande e portarli fuori strada con spiegazioni senza senso è il peggior servizio che si possa rendere alla loro passione e alla loro sicurezza. Quest’articolo è anche per loro, o almeno per quelli tra loro che vorranno leggerlo e capirlo fino in fondo.
Sterzata e spostamento laterale del corpo
1 Equilibrio dei veicoli a due ruote
1.1 I primi tentativi
Per quasi tutta la sua lunghissima storia, l’umanità non ha mai neanche immaginato la possibilità di muoversi su veicoli a due ruote. Quest’idea cominciò a formarsi solo a cavallo tra il XVIII e il XIX secolo, in piena Rivoluzione industriale, quando le invenzioni in tutti i campi cominciarono a susseguirsi a ritmo sempre più vertiginoso.
Durante i primi tentativi ci si accorse subito che questi mezzi non erano intrinsecamente stabili e richiedevano doti non comuni alla guida, perciò fu subito chiaro che, se si voleva favorirne la diffusione, era necessario fare in modo che potessero rimanere in equilibrio il più possibile automaticamente, cioè senza intervento del pilota. Non a caso la prima bicicletta prodotta su larga scala, la “Rover” del 1885, aveva questa caratteristica – e tante altre – ripresa in tutte le biciclette successive e poi in tutte le moto fino ai nostri giorni.
Nei prossimi paragrafi vedremo come fanno i veicoli a due ruote allineate a stare in equilibrio automaticamente, cioè a essere autostabili.
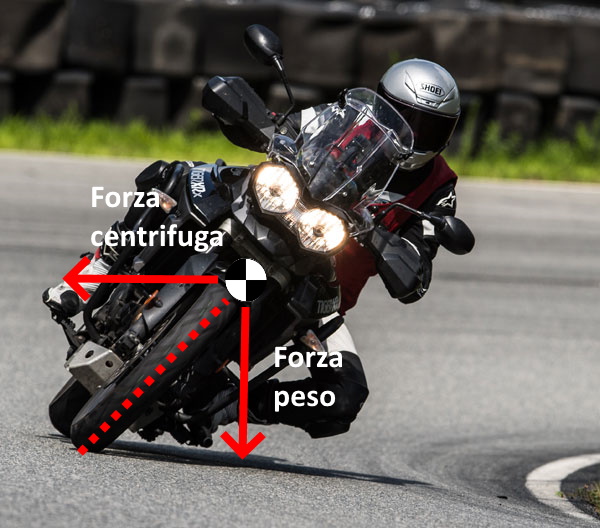
1.2 Bilanciamento tra forza peso e forza centrifuga
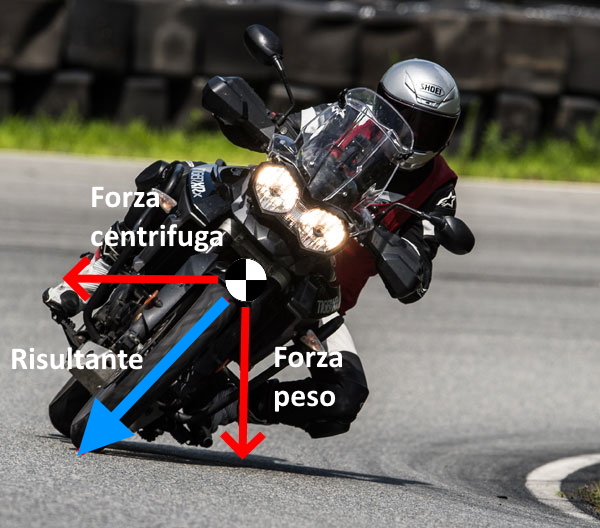
Per mantenersi in equilibrio, un veicolo a due ruote deve sterzare nella direzione verso cui eventualmente è inclinato, in modo che la forza centrifuga [1] risultante lo spinga verso l’esterno della curva e compensi così la sua forza peso, che invece lo fa cadere verso l’interno. Se queste due forze sono in equilibrio, il veicolo mantiene costante il proprio assetto, altrimenti esso varia la propria inclinazione. In particolare:
se la sterzata è eccessiva, il veicolo tenderà a raddrizzarsi, per poi inclinarsi dalla parte opposta
se la sterzata è insufficiente, il veicolo tenderà a inclinarsi sempre di più.
Figura 1 – Forza centrifuga e forza peso
Se si ragiona un pò su quanto detto sopra, appare chiaro che, per rendere autostabile un veicolo del genere, sono necessarie due cose:
quando il veicolo si inclina da un lato, la ruota anteriore deve sterzare automaticamente e progressivamente dalla parte dell’inclinazione, maun po’ troppo, in modo da generare un po’ di più della forza centrifuga strettamente necessaria per bilanciare la forza peso e così riportare automaticamente il veicolo in posizione verticale
man mano che il veicolo ritorna in posizione verticale, la ruota anteriore deve ritornare automaticamente e progressivamente nella posizione centrale, per evitare che il veicolo si inclini nella direzione opposta.
Il comportamento dello sterzo è dunque la chiave di tutto; se si riesce a farlo funzionare in questo modo, è fatta.
1.3 Fenomeni giroscopici
Le ruote della moto sono giroscopi, in quanto ruotano intorno a un asse di rotazione – il mozzo – sono simmetriche rispetto ad esso e hanno un’elevata inerzia, dovuta al loro diametro e al fatto che buona parte della propria massa è concentrata lungo la circonferenza – il cerchione e lo pneumatico. Come tali, esse sono soggette a fenomeni giroscopici di vario tipo, che hanno un ruolo fondamentale nella dinamica dei veicoli a due ruote. Nel seguito sono descritti i due fenomeni che ci interessano maggiormente.
a. Effetto giroscopico in fase di inclinazione del veicolo
Quando un veicolo a due ruote allineate si inclina, la sua ruota anteriore sterza automaticamente dalla parte dell’inclinazione[2].
Per esempio, durante un’inclinazione a sinistra, la massa del punto più alto della ruota – che è quello che durante l’inclinazione si muove più velocemente – sarà spinta verso sinistra dall’inclinazione crescente, perciò acquisirà una traiettoria diagonale diretta verso sinistra (frecce rosse) e tenderà a proseguire per inerzia lungo tale traiettoria. Essa però sarà costretta a seguire la circonferenza e quindi a rientrare verso destra, perciò tirerà la ruota a sterzare verso sinistra.
Figura 2 – Inclinazione della ruota e precessione giroscopica
Questo fenomeno può essere simulato facilmente con una ruota di bicicletta tenuta in rotazione fra le mani.
VIdeo 1 – Effetto dell’inclinazione su un giroscopio
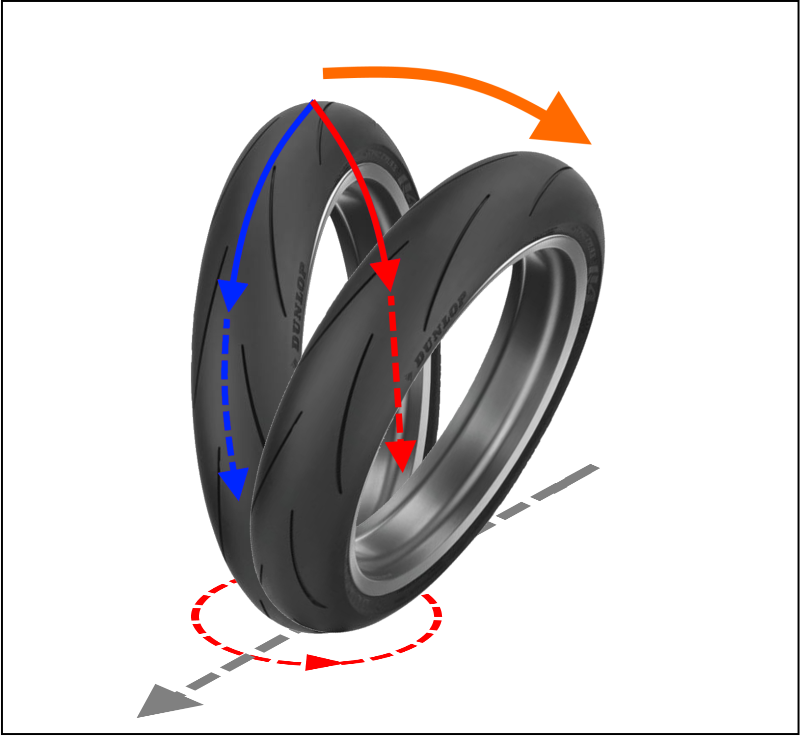
b. Effetto giroscopico durante una curva a inclinazione costante
Durante la percorrenza della curva, quando il veicolo a due ruote ha raggiunto e mantiene un angolo di inclinazione costante, il fenomeno giroscopico descritto al precedente punto a, proprio di una ruota che si sta inclinando, cessa di manifestarsi. In assenza di altri effetti, la ruota a questo punto dovrebbe smettere di sterzare e quindi, per inerzia giroscopica, dovrebbe mantenere costante la direzione del proprio asse e proseguire dritta. Dato che, invece, continua a curvare, c’è qualcos’altro che ne determina il comportamento. La ragione di ciò sta nel fatto che, una volta che la moto sta curvando con un’inclinazione costante, la ruota anteriore non assume una traiettoria rettilinea uniforme, ma è inclinata e contemporaneamente sta traslando lateralmente per seguire la traiettoria curva. Per tale ragione si verifica quanto segue.
La massa del punto superiore della ruota – quello più interno alla curva – durante il movimento roto-traslatorio della ruota stessa è costretto a seguire la circonferenza verso l’esterno e quindi a subire una forza centrifuga minore rispetto a quella della moto, ma per inerzia vorrebbe muoversi insieme a questa e quindi tira la parte anteriore della ruota verso l’interno della curva.
Simmetricamente, La massa del punto inferiore della ruota – quello più esterno alla curva – durante il movimento roto-traslatorio della ruota stessa è costretto a seguire la circonferenza verso l’interno e quindi a subire una forza centrifuga maggiore rispetto a quella della moto, ma per inerzia vorrebbe muoversi insieme a questa e quindi tira la parte posteriore della ruota verso l’esterno della curva.
Figura 3 – Effetto giroscopico durante una sterzata a inclinazione costante
Il risultato di questo fenomeno è che la ruota anteriore di un veicolo a due ruote continua a sterzare verso la curva anche quando l’inclinazione dello stesso rimane costante.
SI noti che, a differenza del precedente, questo fenomeno non può essere simulato in modo efficace tenendo in mano una ruota di bicicletta mentre si sta in piedi, perche in questo modo viene sostanzialmente a mancare la traslazione della ruota verso l’interno della curva.
c. Effetto complessivo dei due fenomeni giroscopici
Nel complesso, i due fenomeni giroscopici a. e b. descritti sopra consentono alla moto di curvare quando si inclina, di mantenere sterzata la ruota anteriore durante la curva e di riportare lo sterzo verso il centro quando la moto si raddrizza. Ma allora, visto che la ruota anteriore si comporta proprio come dovrebbe, perché i primi bicicli avevano problemi di equilibrio? Perché tali effetti si manifestano in modo eccessivamente brusco, se lo sterzo non è dotato di un’adeguata avancorsa.
1.4 Avancorsa
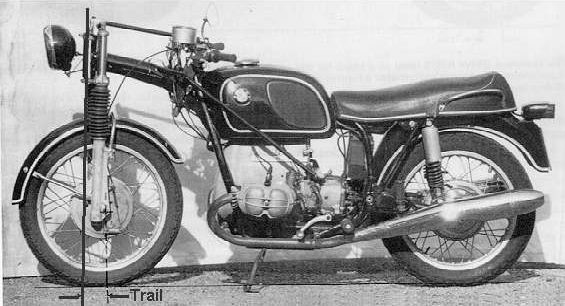
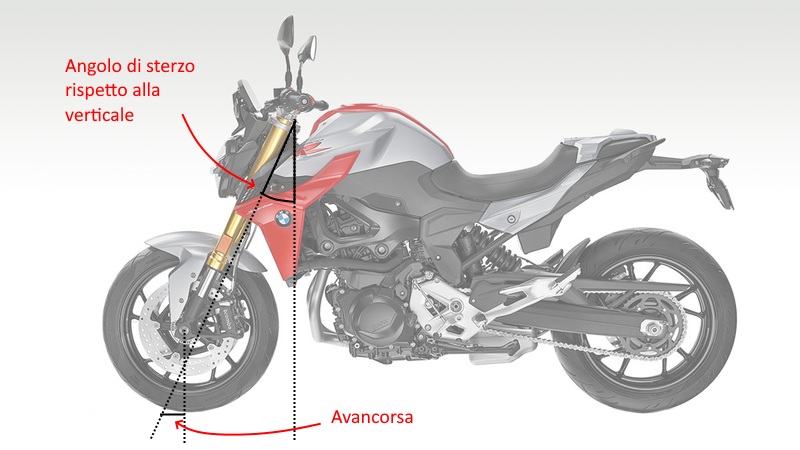
L’avancorsa è la distanza tra il punto in cui l’asse di rotazione dello sterzo interseca il piano su cui poggia la moto e il centro dell’impronta a terra dello pneumatico anteriore. Si dice:
avancorsapositiva quando l’asse di sterzo cade davanti al punto di appoggio della ruota anteriore
avancorsa negativa quando cade dietro di esso
avancorsa nulla quando i due punti coincidono.
Figura 4 – Avancorsa positiva
Tutti i veicoli a due ruote moderni sono caratterizzati da un’avancorsa positiva. Infatti, essa offre due vantaggi fondamentali, senza i quali nessun veicolo a due ruote allineate potrebbe essere autostabile.
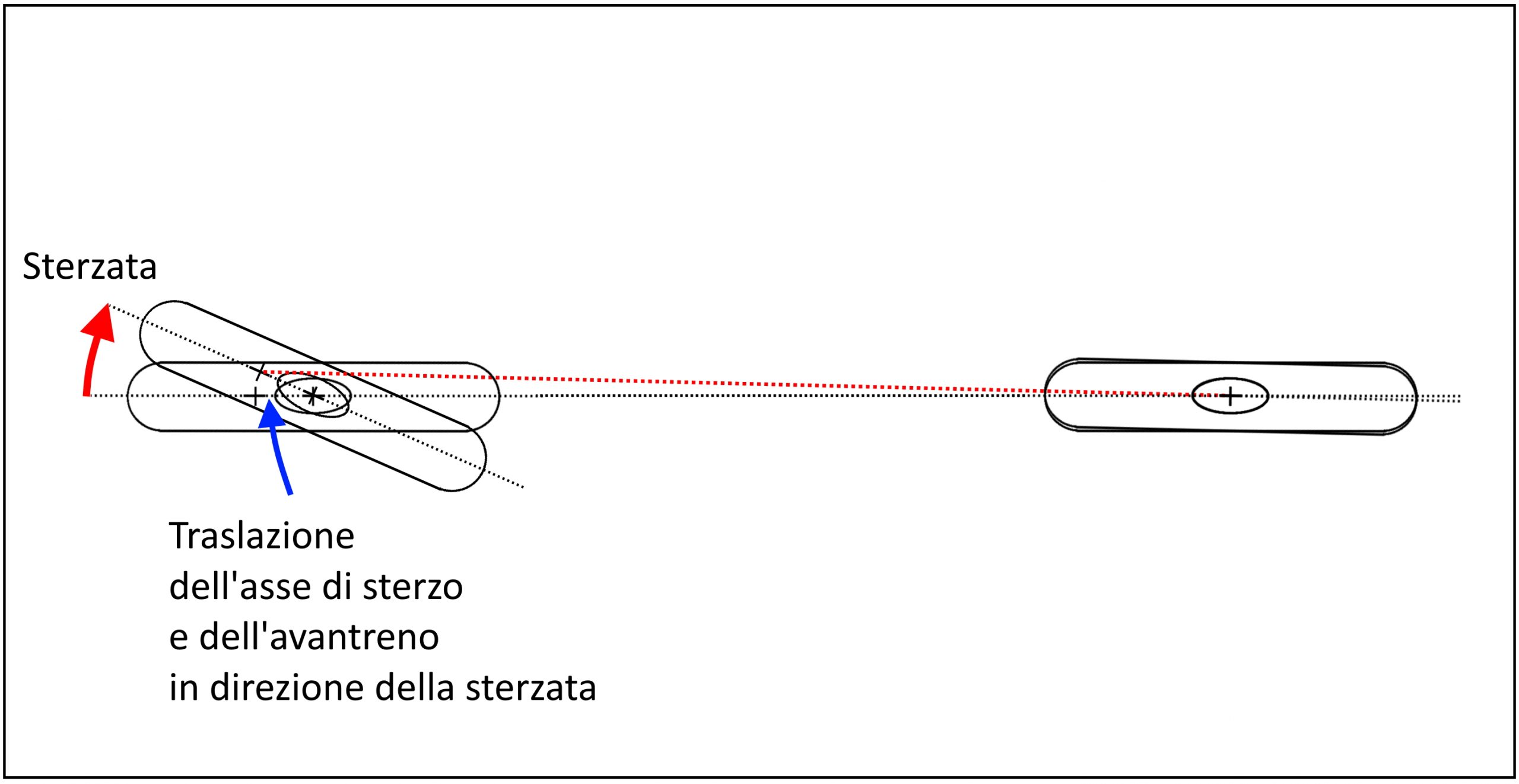
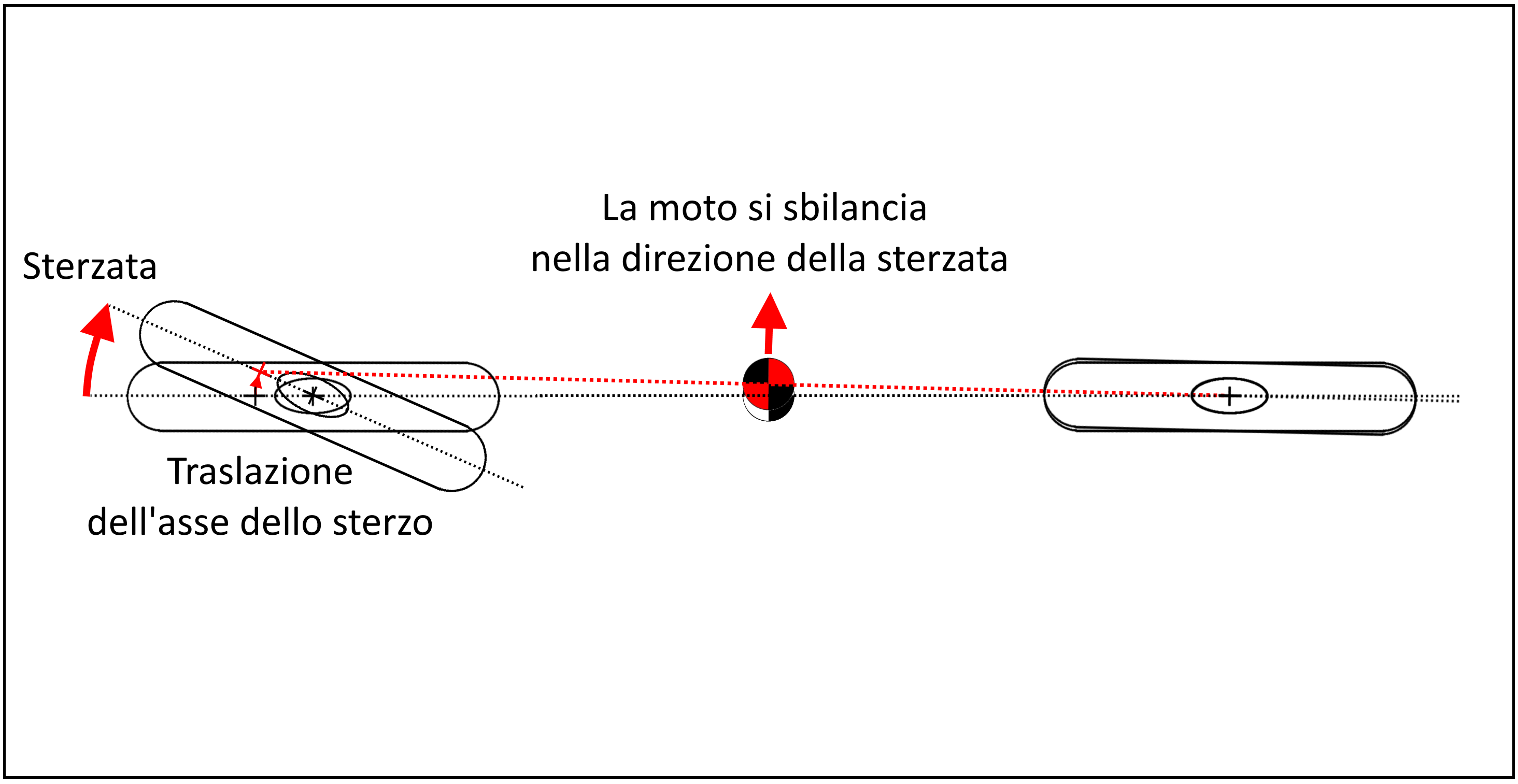
Un’avancorsa positiva rende lo sterzo più pesante da azionare, specialmente al crescere della velocità, e quindi impedisce al pilota di agire troppo bruscamente su di esso e mettere in grave rischio la stabilità. Ciò avviene, perché azionando lo sterzo, l’avantreno della moto trasla lateralmente in direzione della sterzata (si veda la successiva figura 5), opponendosi a questa con la propria inerzia. In tal modo, l’avancorsa:
in rettilineo, contribuisce a mantenere la ruota anteriore allineata al centro
all’inclinarsi della moto, limita la sterzata automatica della ruota indotta dagli effetti giroscopici descritti sopra.
Quando un veicolo si inclina e la sua ruota anteriore sterza nella direzione della curva, per una semplice ragione geometrica il punto di contatto di tale ruota con il suolo si sposta in avanti. In assenza di un’adeguata avancorsa, al crescere dell’angolo di inclinazione si viene a creare un’avancorsa negativa e ciò determina l’immediata sterzata a battuta della ruota verso l’interno. Per farsi un’idea del fenomeno, basti dire che ciò è quanto avviene sui veicoli a due ruote moderni quando si tenta di salire obliquamente su un gradino.
Figura 5 – Traslazione dell’asse di sterzo e dell’avantreno a ruota sterzata
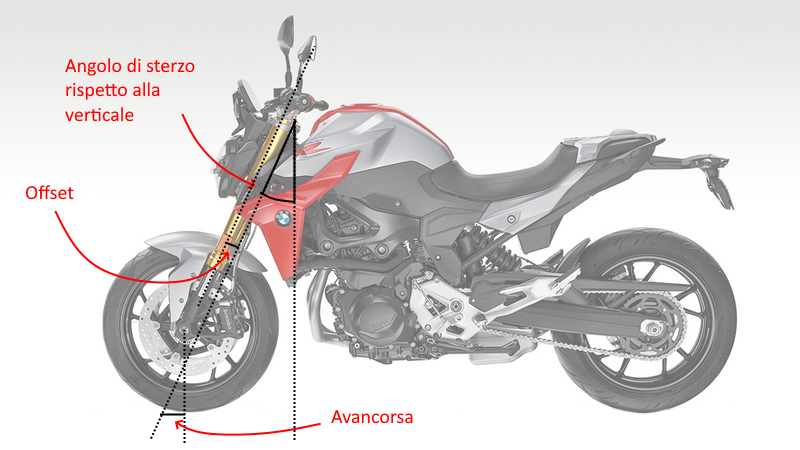
Sulle moto moderne l’avancorsa si aggira di solito intorno ai 100 mm e varia in base alle caratteristiche di ciascun modello e all’uso a cui è destinato. Come si può vedere dalla figura 3 sopra, essa dipende:
dall’offset, che è la distanza tra l’asse di sterzo e il piano ad esso parallelo e passante per l’asse della ruota anteriore
dall’angolo di inclinazione dell’asse di sterzo.
Combinando opportunamente questi parametri, è possibile ottenere l’avancorsa desiderata con una grande varietà di angoli di inclinazione dell’asse di sterzo, dalla BMW R75/5 di Tony Foale con sterzo verticale ai chopper con sterzo quasi orizzontale.
Figura 6 – BMW R75/5 di Tony Foale con asse di sterzo verticale
Figura 7 – Chopper
I primi bicicli stavano in equilibrio precario, appunto perché avevano sterzo quasi verticale e privo di offset e quindi avevano avancorsa prossima allo zero.
FIgura 8 – Biciclo di Michaux (1860 circa)
Il comportamento autosterzante della moto è influenzato da parecchie caratteristiche, tra cui le seguenti:
avancorsa (aumentandola, diminuisce la tendenza della ruota a sterzare)
peso della ruota anteriore, dischi inclusi (aumentandolo, aumenta la tendenza della ruota a sterzare)
diametro della ruota anteriore (idem)
inclinazione dell’asse di sterzo rispetto alla verticale, a parità di avancorsa (aumentandola, diminuisce la tendenza della ruota a sterzare)
peso gravante sulla ruota anteriore (aumentandolo, diminuisce la tendenza della ruota a sterzare)
peso delle masse poste alle estremità del manubrio (idem).
È chiaro che qualsiasi modifica apportata a questi elementi senza cognizione di causa può variare notevolmente il comportamento della moto e in casi estremi può persino renderla incontrollabile.
È infine importante notare che il comportamento autosterzante di un veicolo a due ruote si basa sul fatto che le ruote abbiano sufficiente aderenza per non derapare. Una sbandata della moto dovuta a perdita di aderenza comporta la rottura dell’equilibrio automatico, può richiedere correzioni attive da parte del pilota e può portare anche alla caduta della moto.
2 Gestire la traiettoria con lo sterzo
2.1 Come funziona
Quando siete al volante di un’auto e sterzate da una parte, gli pneumatici generano a livello dell’asfalto una forza centripeta, che tende cioè a spostarli lateralmente nella direzione della sterzata, mentre il baricentro dell’auto, che è situato più in alto, tende ad andare dritto per inerzia. La combinazione di queste due forze genera un momento che fa inclinare l’auto in direzione opposta rispetto alla sterzata.
Figura 9 – Sterzata e rollio
Questo effetto si verifica su qualsiasi veicolo che poggia su ruote e quindi anche sulle moto: se si sterza da una parte, la moto si inclina dall’altra. Una volta che la moto si inclina dalla parte “sbagliata”, per le ragioni viste nel paragrafo 1, la ruota anteriore sterza nella stessa direzione e la moto inizia a percorrere la curva.
Video 2 – Fasi del push-steering
Si noti che queste fasi si susseguono automaticamente con grande rapidità e, a parte l’impulso iniziale 1, senza alcun intervento del pilota. Non è affatto vero che per inserirsi in curva si debba sterzare prima da una parte e poi dall’altra: bisogna continure a premere sempre nella stessa direzione, poi la precessione giroscopica e l’avancorsa fanno tutto il resto [4].
Ora, se per curvare dovessimo pensare di dover sterzare al contrario, diventeremmo pazzi. Perciò conviene vedere la cosa in modo più intuitivo: per inclinare la moto in una direzione, basta premere in avanti la manopola da quel lato, e più forte sarà la pressione, più la moto si inclinerà e più curverà stretta. Ecco perché questa tecnica è chiamata in inglese push-steering, che vuol dire appunto “sterzata mediante spinta”[3].
Da quanto detto nel paragrafo 1, ricordiamo che un’avancorsa ben dimensionata fa sì che la precessione giroscopica faccia sterzare la ruota nella direzione dell’inclinazione di quel tanto che basta, da rendere la forza centrifuga lievemente eccedente rispetto alla forza peso, in modo da autostabilizzare la moto. Per tale ragione, se si vuole continuare a curvare, occorre continuare a premere sulla manopola interna, altrimenti la moto ritorna in posizione verticale e riprende la marcia rettilinea.
Il push-steering funziona sia a moto dritta che a moto inclinata, quindi esso consente sia di iniziare una curva, sia di variare l’inclinazione e quindi la traiettoria della moto durante una curva. In ogni caso, basta semplicemente:
premere su una manopola, per iniziare a curvare nella direzionedove si preme
premere maggiormente sulla manopola interna, per stringere la traiettoria
smettere di premere sulla manopola interna, per allargare la traiettoria.
Il video seguente illustra il funzionamento su strada di questa tecnica. Per chiarezza, le mani sono tenute aperte, senza impugnare le manopole, in modo da rendere visivamente chiaro che esse spingono.
Video 3 – Attivazione del push steering alla guida
Sperimentare l’efficacia del push-steering alla guida è piuttosto semplice. Lungo un rettilineo, piazzatevi a una velocità media – 60-70 km/h va benissimo – togliete la mano sinistra dal manubrio e con la destra spingete la manopola in avanti – cioè sterzate verso sinistra; vi accorgerete che la moto curverà subito verso destra.
Il push-steering non funziona alle bassissime velocità, allorché lo sterzo va azionato dalla parte giusta. Perché? Come abbiamo visto sopra, la sospensione anteriore delle moto è caratterizzata dalla presenza dell’avancorsa, a causa della quale la ruota poggia a terra più indietro rispetto all’asse dello sterzo. Per questa ragione, se si sterza a moto ferma o quasi, l’asse dello sterzo si sposta dalla parte della sterzata e con esso tutta la parte anteriore della moto. In questo modo la moto si sbilancia leggermente dalla parte della sterzata e quindi tende a cadere nella direzione della curva, di quel tanto che basta a vincere la ridottissima forza centrifuga.
Figura 10 – Effetto di una sterzata sul baricentro
Quando invece la velocità supera una certa soglia limite – intorno ai 15-20 km/h, dipende principalmente dalla misura dell’avancorsa – la forza centrifuga prevale su questo effetto e il push-steering inizia a funzionare.
2.2 Pregi
Il push-steering:
funziona sia a moto dritta che a moto inclinata
è molto preciso
consente di impostare qualsiasi traiettoria
è efficace con qualsiasi tipo di moto, anche quelle più pesanti
è rapido, anche se non istantaneo, per via della sterzata iniziale in senso contrario necessaria alle velocità normali, specialmente in sella a una moto pesante, perché la durata e l’ampiezza della fase iniziale negativa aumentano con l’aumentare della massa.
2.3 Difetti
Di suo, il push-steering non ha difetti. Esso però ha dei limiti nella guida veloce, che vengono superati combinando questa tecnica con lo spostamento del baricentro del pilota, come spiegato più avanti.
2.4 Quando si usa
Grazie a tali caratteristiche, la tecnica del push-steering è efficace per:
impostare e percorrere qualsiasi traiettoria con grande precisione
variare anche notevolmente una traiettoria a curva già impostata
schivare un ostacolo improvviso, anche di grandi dimensioni.
Insomma, è una tecnica buona per tutti gli usi. Non a caso è usata da tutti i motociclisti, anche quelli – la maggioranza – che non ne sono consapevoli. Alcuni di questi sono addirittura convinti di azionare lo sterzo dalla parte della curva, il che è semplicemente impossibile.
Ma anche se tutti usano il push-steering, esserne coscienti comporta due grandi vantaggi:
consente di manovrare più efficacemente qualsiasi moto e in particolare quelle più pesanti
consente di schivare molto più efficacemente gli ostacoli.
Chi invece non ne è cosciente, faticherà di più a controllare la moto e, soprattutto, reagirà al pericolo in modo meno efficace o addirittura controproducente. Ho visto con i miei occhi – e in un caso ero passeggero – motociclisti che, per evitare un ostacolo, gli finivano addosso nel tentativo di sterzare dalla parte opposta.
Ecco perché è fondamentale che tutti i motociclisti prendano coscienza del push-steering e imparino a sfruttarne le potenzialità.
3 Gestire la traiettoria con lo spostamento laterale del corpo del pilota
3.1 Come funziona
Se il pilota sposta il proprio baricentro lateralmente rispetto alla moto, contrariamente a quanto molti credono (me per primo, per lungo tempo), la moto non si inclina dalla parte verso cui il pilota si sporge, bensì nella direzione opposta. Ciò avviene per il principio di conservazione della quantità di moto, per il quale, in assenza di forze esterne al sistema moto + pilota, il baricentro del sistema stesso continua a muoversi per inerzia nella stessa direzione. Il pilota fa parte del sistema, per cui quando egli sposta il proprio baricentro da un lato, necessariamente il baricentro della moto si sposta dall’altro. Naturalmente, il tutto è influenzato dal rapporto tra il peso della moto e quello del pilota: più la moto è pesante rispetto al pilota, meno essa si inclinerà allo spostarsi di questo.
Come sappiamo, la precessione giroscopica, tenuta a bada dall’avancorsa, fa sterzare la ruota nella direzione dell’inclinazione della moto. Anche in questo caso, quindi, esattamente come nel caso del push-steering, la ruota sterza in direzione contraria a quella verso cui si vuole andare e perciò si realizza la stessa sequenza:
la moto viene inclinata dalla parte sbagliata
la ruota anteriore sterza dalla parte sbagliata
la moto si sbilancia nella direzione giusta, cioè quella del busto
la ruota anteriore per precessione giroscopica sterza nella stessa direzione
la moto curva nella direzione voluta.
Da quanto detto nel paragrafo 1, ricordiamo che un’avancorsa ben dimensionata fa sì che la precessione giroscopica faccia sterzare la ruota nella direzione dell’inclinazione abbastanza, da rendere la forza centrifuga lievemente eccedente rispetto alla forza peso, in modo da autostabilizzare la moto. Per continuare a curvare, occorre quindi continuare a sporgersi verso l’interno per mantenere la moto più sollevata e quindi diminuire leggermente la sterzata della ruota anteriore.
Alcuni definiscono questa tecnica “premere sulle pedane”, ma è una denominazione impropria, perché se si fa solo questo, senza spostare il busto, non succede assolutamente nulla. Spostando il busto e scaricando il peso sulla pedana si ottiene un maggior spostamento del pilota, un maggior spostamento in senso opposto del baricentro della moto e quindi una maggior efficacia della manovra.
Molti motociclisti affermano di curvare in questo modo, ma in realtà non spostano il corpo in maniera significativa e curvano con il push-steering. Ma anche quelli che effettivamente spostano il corpo, senza volerlo applicano quasi sempre anche forze longitudinali sulle manopole e quindi combinano lo spostamento del proprio baricentro con il push-steering. L’unico modo per curvare con questa tecnica “in purezza” consiste nel metterla in pratica senza le mani sul manubrio. Se ci provate – lungo un tratto senza traffico in discesa o inserendo il cruise control – scoprirete quanto effettivamente la vostra traiettoria nella guida di tutti i giorni è dovuta al modo in cui spostate il vostro baricentro e quanto invece alla vostra azione sullo sterzo. Se pensavate che tutto il merito andasse al vostro tuffarvi con il corpo nelle curve, rimarrete profondamente delusi.
Il video che segue illustra il funzionamento di questa tecnica, senza mani, per verificarne la reale efficacia.
Video 4 – Spostamento laterale del corpo
3.3.2 Pregi
Questa tecnica, nell’ipotesi che sia usata da sola, cioè senza combinarla col push-steering:
funziona sia a moto dritta che a moto inclinata
consente ampi cambiamenti di direzione
funziona anche senza mani.
3.3.3 Difetti
Questa tecnica:
è più lenta e meno precisa del push-steering, specialmente nella guida veloce e nelle curve strette
è assai meno efficace sulle moto pesanti, dove il peso del pilota perde importanza rispetto al peso totale.
3.3.4 Quando si usa
Al di fuori del caso della guida senza mani, lo spostamento del peso è in realtà sempre abbinato all’uso dello sterzo e il bello è che lo migliora in qualsiasi circostanza, perché:
aiuta a mantenere l’equilibrio nelle manovre a bassissima velocità
rende più rapida la sterzata, specialmente su moto dallo sterzo pesante, perché
minimizza il rischio di grattare qualche cosa a terra nella guida veloce, perché consente una minor inclinazione della moto a parità di velocità e di raggio della traiettoria
dona piacevolezza alla guida, in quanto il pilota percepisce che la moto mantiene la traiettoria curva senza dover agire sullo sterzo.
Figura 11 – Minor inclinazione della moto con lo spostamento del corpo
Insomma, l’accoppiata push-steering + spostamento del peso è vantaggiosa in tutte le circostanze della guida e specialmente nella guida veloce.
[2] L’effetto si manifesta anche sulla ruota posteriore, che però non ha la libertà di sterzare e scarica tale tendenza sul forcellone. ⇑
[3] Per definire il push-steering si usa spesso il termine “controsterzo”, che in realtà è la manovra con cui si recupera una sbandata del retrotreno con una sterzata in senso contrario rispetto alla curva. Nel nostro caso non c’è alcuna sbandata da recuperare, per cui il termine è improprio. ⇑
[4] Qui cade in errore perfino l’Ing. Vittore Cossalter, secondo il quale il pilota prima sterza in senso contrario e poi, una volta che la moto si inclina dalla parte giusta, gira lentamente lo sterzo nella direzione della curva (Motorcycle Dynamics edizione italiana, seconda edizione 2014, par. 8.5 e 8.6 pag. 301 e 303). ⇑
Nel provare le nuove BMW F900R e F900XR mi sono imbattuto in un fatto curioso nella relativa cartella stampa, riguardante la geometria della sospensione anteriore. Perché quindi non cogliere l’occasione per parlare un po’ di questo argomento?
Gli elementi fondamentali di tale geometria sono l’angolo di inclinazione dell’asse di sterzo rispetto alla verticale e l’avancorsa. Entrambi influiscono sostanzialmente sul comportamento della moto e non a caso sono presenti in tutte le schede tecniche dei modelli in commercio.
Ma che cosa sono esattamente, e che
effetto hanno sulla guida?
L’angolo di sterzo è l’angolo tra l’asse intorno a cui ruota lo sterzo e la verticale .
L’avancorsa invece è la distanza tra il punto in cui l’asse dello sterzo interseca il piano su cui poggia la moto e il centro dell’impronta a terra dello pneumatico anteriore (che, quando la moto poggia su un piano, coincide con la verticale sullo stesso piano del centro del mozzo della ruota anteriore).
La figura seguente dovrebbe chiarire
il tutto.
L’angolo di sterzo
determina principalmente la prontezza della sterzata, cioè la velocità
con cui la ruota sterza a parità di velocità di rotazione del manubrio: più l’angolo
è stretto, e quindi più lo sterzo è verticale, e più la ruota sterza
rapidamente.
L’avancorsa invece ha effetto
principalmente sulla durezza dello sterzo: più essa è lunga e più lo
sterzo oppone resistenza alla sterzata. A parità di altre condizioni, un’avancorsa
lunga determina quindi uno sterzo più pesante, ma un comportamento più stabile
della moto, mentre un’avancorsa corta aumenta la maneggevolezza a scapito della
stabilità.
L’angolo di sterzo è scelto dai
progettisti in funzione del carattere della moto e dalla velocità massima raggiungibile;
più il carattere è sportivo e più l’angolo di sterzo tende a essere chiuso.
L’avancorsa è scelta in base a una
logica un po’ diversa, perché di solito cresce con la velocità e diminuisce
quando si vuole dare maggior leggerezza allo sterzo.
Avancorsa e angolo di sterzo sono
correlati tra loro. Infatti, guardando la figura precedente, appare chiaro che
se aumentiamo l’angolo di sterzo, a parità di altre condizioni otteniamo un’avancorsa
più lunga. Ma in realtà essi possono essere variati a piacimento uno rispetto
all’altro.
Se ci fate caso, su nessuna moto
l’asse di sterzo si trova esattamente all’altezza degli steli della forcella;
esso è sempre un po’ arretrato rispetto ad essi e ciò appare evidente
osservando qualunque piastra di sterzo.
La misura di tale arretramento si
chiama offset, e come si può intuire osservando l’immagine seguente, più
esso aumenta, a parità di angolo di sterzo, e più l’avancorsa si accorcia.
Quindi, variando l’offset è
possibile variare a piacimento la relazione tra avancorsa e angolo di sterzo.
In questo modo è possibile, per esempio, ottenere un’avancorsa di dimensione
normale pur in presenza di un angolo di sterzo molto aperto e ciò rende
possibile costruire chopper tutto sommato guidabili (anche se con una prontezza
di sterzo ridicolmente bassa).
La tabella seguente offre spunti
interessanti al riguardo.
Modello
Angolo di sterzodalla verticale °
Avancorsa mm
BMW S1000RR
23,1
93,9
MV Agusta F3
24,0
99,0
Ducati Monster
24,0
93,0
Ducati
Panigale V4
24,5
100,0
Ducati Multistrada
V4
24,5
102,5
BMW R1250GS
Adventure
24,9
95,4
BMW S1000XR
25,5
116,0
Honda CB650F
25,5
101,0
BMW R1250GS
25,7
100,6
BMW F800R
26,0
100,0
Harley-Davidson
Ultra Limited
26,0
170,0
BMW F750GS
27,0
104,5
BMW F850GS
28,0
126,0
Honda GL
1800 Gold Wing
29,25
109,0
Harley-Davidson
Iron 883
30°
117,0
Si notino in particolare le quote
più sportive della BMW R1250GS Adventure rispetto alla versione Standard, che
servono a compensare il maggior peso sull’avantreno. Ecco perché chi guida un’Adventure
si stupisce per la sua maneggevolezza.
Torniamo ora alla cartella stampa delle BMW F900R e XR. Prima di andare a provare le moto, da buon secchione me la sono letta tutta, ma ho fatto un salto sulla sedia quando ho visto che l’angolo di sterzo su entrambi i modelli dovrebbe essere pari a 29,5° (la Casa bavarese curiosamente dichiara sempre l’angolo rispetto all’orizzontale, in questo caso 60,5°).
Dalla tabella precedente appare
evidente che si tratterebbe di una scelta davvero bizzarra, perché un angolo così
aperto è adatto a una cruiser, non certo a moto dalle velleità sportiveggianti
come queste.
Ho dato quindi un’occhiata alle
foto, e la cosa proprio non mi quadra: sulle F l’angolo di sterzo appare
piuttosto chiuso, assai più simile a quello di una supersport che a quello di
una cruiser.
Nella figura che segue ho sovrapposto
in trasparenza la F900R e la Harley-Davidson Iron 883 (angolo dichiarato 30,0°).
È un metodo un po’ pecoreccio, siamo
d’accordo, ma la differenza è evidente, parliamo di circa 5-6°, non certo degli
0,5° risultanti dai dati dichiarati.
Una differenza del genere, molto
pronunciata, si riflette anche nel comportamento alla guida: lo sterzo delle F900R
e XR è nettamente più pronto di quello della 883.
Fin qui le prove portate a
sostegno della mia affermazione — una fotografia e alcune sensazioni alla guida
— non sono proprio di livello scientifico, lo ammetto. Ma ho un’arma segreta
che mostra infallibilmente l’errore, e il bello è che me la fornisce la stessa
BMW.
Nella cartella stampa delle nuove
F900, è riportata un’interessante tabella dove sono messe a confronto le quote
dell’avantreno di F800R, F900R e F900XR.
Di solito, ogni costruttore dichiara l’angolo di inclinazione di sterzo (steering head angle, in questo caso misurato rispetto all’orizzontale) e l’avancorsa (castor o trail) di ogni modello, ma in questa tabella, In via del tutto eccezionale, è presente anche l’offset (fork offset).
Come ho detto sopra, l’offset è
il “trucco” che viene usato dai costruttori per armonizzare nel modo migliore angolo
di sterzo e avancorsa. Le due F900 hanno lo stesso angolo, ma la F900R ha un’avancorsa
sensibilmente superiore rispetto alla XR — cosa che peraltro risulta assai
evidente alla guida — e BMW con questa tabella vuole appunto chiarire che
questa differenza è stata ottenuta con un diverso offset.
Però, se io ho due di queste misure,
la terza è univocamente determinata, non si scappa — a meno che non si ricorra
a piastre di sterzo molto particolari, che consentono una diversa inclinazione
degli steli della forcella rispetto all’asse dello sterzo, cosa che si riscontra
solo su alcuni chopper estremi — e i dati forniti da BMW non tornano.
Facendo un po’ di calcoli — mi è toccato rispolverare un po’ di trigonometria, se avete voglia di fare altrettanto, potete dare un’occhiata qui — emerge che per abbinare l’avancorsa e l’offset dichiarati per entrambe le F900, occorrerebbe avere un angolo di sterzo di circa 24,95° (per la precisione 24,97° sulla R e 24,93° sulla XR), perfettamente coerente con i rilievi visivi e con le sensazioni alla guida di queste moto e vicino ai 26° della F800R.
Noi motociclisti, si sa, siamo gente un po’ sborona e che chiacchiera molto, spesso per vantare competenze e capacità più o meno immaginarie. Naturalmente, tra i vari argomenti su cui accanirsi, le capacità velocistiche sono l’argomento principe, quello che sta veramente a cuore alle Femmine e ai Maschi Alfa e alle/agli aspiranti tali, cioè alla maggioranza degli esemplari di homo motociclans.
Il concetto di velocità è naturalmente collegato a quello della potenza; a parità di altre condizioni, più una moto è potente, più è veloce, e questo ha spinto e spinge schiere di motociclisti all’acquisto di moto sempre più potenti, tant’è vero che negli anni ’80 i 60 cavalli di una Yamaha RD350 erano considerati una potenza da strappare le braccia, mentre oggi si consiglia al (e alla) principiante di iniziare con una Honda Hornet da 100 cavalli, per poi passare in breve tempo ai 150 cavalli di una maxienduro o ai 200 e oltre di una supersportiva.
Immancabilmente, la prima domanda che fa un motociclista interessato a una moto è “quanti cavalli ha?” e i bar sono pieni di gente che si vanta di aver acquistato la moto più potente della categoria o comunque più potente di quella degli amici, beandosi della supposta automatica promozione a massimo velocista della comitiva. Illusi.
Il fatto è che non ha alcun senso misurare le capacità velocistiche di una moto su strada basandosi sulla velocità massima (in pista il discorso è un po’ diverso): una supersport attuale supera di slancio i 300, ma basta una qualunque 600 degli ultimi vent’anni per superare i 200, e già questa è una velocità eccessiva su strada, non solo perché è vietata, ma anche perché il traffico la rende spesso impossibile, e comunque tenerla per più di qualche minuto è una faccenda piuttosto scomoda, a causa delle turbolenze aerodinamiche.
Se si vuole scegliere una moto veloce su strada, è molto più utile ragionare in termini di accelerazione: se una moto impiega meno tempo di un’altra per arrivare, diciamo, a 100 km/h, allora posso dire che quella moto su strada – almeno nel misto, dove di solito non si riesce ad andare oltre tale velocità – è effettivamente più veloce.
E qui già sento il coro al bar che ulula: “ma una moto più potente è anche più scattante!” Sì e no. La dura verità è che una CBR1000RR da 213 CV e una CB650F da 95 CV impiegano, in mano a gente che sa guidare, pressappoco lo stesso tempo per raggiungere i 100 km/h, cioè circa 3,5 secondi. Giuro. Il fatto è che puoi metterci tutti i cavalli che vuoi, ma in pratica nessuna moto è in grado di impiegare meno di quel tempo per raggiungere quella velocità, perché se no impenna, a causa dell’interasse assai più corto che sulle automobili, rendendo necessario parzializzare il gas[1].
Certo, c’è comunque una bella differenza tra una 1000 e una 650: la prima viene sparata fuori dalle curve come con una fionda anche nelle marce alte, mentre con la seconda occorre lavorare di più con il cambio per ottenere lo stesso risultato. Senza contare che la supersportiva 1000 effettivamente diventa assai più scattante di tutte le altre moto all’aumentare della velocità, perché oltre una certa soglia queste non ce la fanno ad arrivare al limite del ribaltamento e quindi la potenza scaricata a terra dai loro motori è effettivamente l’unico loro limite all’accelerazione.
Ma quando si percorre un bel tratto di curve con il coltello fra i denti, la velocità massima che si riesce a raggiungere tra una curva e l’altra non è di molto superiore ai fatidici 100 km/h e può essere anche di parecchio inferiore se è un misto stretto.
Quindi, una potentissima 1000 supersportiva non ci rende più veloci su strada. Può avere senso per tante altre ragioni, ovviamente, quali il piacere personale e la maggior semplicità di guida, ma dal punto di vista della velocità pura diventa un’arma micidiale soltanto sulle piste e solo su quelle veloci.
Questo è uno dei motivi per cui le strade sono piene di gente a cavallo di belve da 150 o 200 CV che si fa sverniciare da gente in sella a una vecchia Ducati Multistrada 620 da 63 CV. Ogni riferimento è puramente casuale :)).
Premessa fondamentale: io sono un Kappista. Ho avuto in tutto undici moto BMW, delle quali sette K – compresa quella attuale – e solo una GS, che ho venduto dopo pochi mesi perché la lasciavo quasi sempre in garage per prendere la mia altra moto, una K1200GT. Quindi non sono un giessista sfegatato, tutt’altro.
Però ho studiato a lungo questa moto e fatto parecchia strada su tutte le versioni dalla R1150GS in poi, perciò ne conosco bene pregi e difetti e parlo con cognizione di causa.
Incontro continuamente giessisti fieri della propria moto e non giessisti che mi tempestano di domande sull’argomento. La BMW GS è chiaramente il più grande fenomeno motociclistico degli ultimi vent’anni, e quindi è naturale che mi sia venuta voglia di indagare sulle ragioni di tale successo.
Parlo ovviamente della GS vera, della serie R, 1200 o 1250 nelle sue declinazioni standard o Adventure. Poi ci sono anche le altre, dalla nuova F850GS in giù fino alla G310GS, ma sono roba meccanicamente molto diversa e non hanno il carisma della moto più desiderata.
La GS vera vende a pacchi, più di qualsiasi altro modello, comprese le motine da sedicenni che costano un quinto, e sembra conoscere un successo sempre più inarrestabile.
Chi ce l’ha, ne è fiero, tende a non tradirla, e se lo fa, spesso poi torna indietro. Chi non ce l’ha, ci pensa e ne parla spesso, magari per criticarla:
costa troppo
è brutta
il cardano è duro e sbilancia la guida
non si sente l’avantreno.
Più spesso però si chiede se i suoi tagliandi hanno un costo abbordabile, se la sella non è troppo alta per lui (o lei) e, soprattutto, come fanno quelli che ce l’hanno ad andare così forte. Sì, perché il GS è l’Arma Totale, l’oggetto magico che trasforma qualsiasi rospo motociclistico in un Principe Azzurro.
Insomma, la GS è comunque la moto con cui tutti devono in qualche modo fare i conti ed è circondata da un’aura tutta sua particolare. Vediamo di capire insieme se quest’aura si basa su fatti reali o è solo marketing.
Un po’ di storia
Tempo fa quelli che viaggiavano seriamente in moto si dividevano nettamente in due: gli amanti del bitume e quelli del fango; i primi compravano moto stradali possibilmente carenate, gli altri i mono da cross.
Le cose cambiarono con la nascita delle enduro, genere inventato dalla Yamaha verso la fine degli anni ’70 con la XT500, moto adatte agli sterrati e al fuoristrada relativamente impegnativo, ma abbastanza pratiche e comode da poter essere usate anche per i lunghi viaggi su asfalto.
Di stradali da viaggio se ne vendevano poche, anche perché di solito erano grandi e costose, mentre le più abbordabili enduro monocilindriche ebbero grande successo negli anni 80, durante i quali comparve anche una bicilindrica, la BMW R80 G/S, la capostipite della categoria maxienduro. Al debutto parve inutilmente grande e pesante – anche se vista oggi accanto alla R1250GS Adventure, pare la sua scialuppa – però vinse varie Parigi-Dakar, creandosi una solida fama di mangiatrice di piste sahariane, e anche per questo fece breccia nel cuore degli appassionati.
Da allora è passata molta acqua sotto i ponti. BMW è stata imitata inizialmente da Honda con la sua Africa Twin e poi dalle altre case, finché le maxienduro e le crossover – due categorie quasi sovrapponibili, con la seconda pensata per un uso più specificamente stradale – negli ultimi anni hanno soppiantato le supersportive e le naked nel cuore dei motociclisti, e la GS è la regina indiscussa di questo nuovo corso.
Oggi la maggior parte dei motociclisti – anche quelli che non viaggiano – sceglie una GS o comunque un’altra maxienduro o una crossover, anche se l’unico sterrato che vedrà sarà il vialetto di un agriturismo in Toscana, tant’è vero che la molto più venduta tra le turistiche classiche, la BMW R1200/1250RT, si vende al ritmo di una ogni 14 (quattordici) GS.
Come si spiega questo risultato?
Ragioni del successo
Marketing e comunicazione
Innanzitutto, c’è un marketing coi fiocchi. BMW vende soprattutto auto e sfrutta abilmente l’ego degli acquirenti delle proprie quattro ruote, convincendoli che la GS è perfetta per l’Uomo di Successo e che è tanto sicura e facile da guidare, da poter essere acquistata come prima moto da chiunque.
La Casa dell’Elica è stata inoltre la prima in Europa a usare i finanziamenti con maxi-rata finale e questo ha consentito a molta gente (tra cui me) di portarsi a casa una moto che non avrebbe potuto comprare in contanti o con rate normali.
Altro elemento di forza è la comunicazione. Ogni singolo fotogramma pubblicitario delle GS trasuda libertà di andare ovunque. Magari chi la compra ci fa casa e ufficio e poco più, ma ha acquistato un Sogno di Libertà Assoluta e questo è ciò che davvero conta. Questa moto promette esplicitamente di non fermarsi davanti a niente, e poco importa che, all’apparire della prima campagna “Unstoppable”, le GS abbiano lasciato quasi tutti i loro proprietari a piedi per uno stupidissimo problema elettronico, il messaggio si è comunque infisso nei cuori dei motociclisti di tutto il mondo.
Design
La GS non è certo la moto più elegante del mondo, ma è solida, fatta bene e ha un’aria maschia, robusta, professionale e con pochi fronzoli. Sembra un utensile Bosch e non a caso le sue valigie ricordano quelle dei trapani. La GS trasmette competenza e promette di estendere tale dote a chi la cavalca.
Tecnica
BMW è stata la prima casa motociclistica a equipaggiare le sue moto con accessori, spesso di chiara derivazione automobilistica, per renderla più facile, comoda, sicura e appetibile, primo fra tutti l’ABS, che proposto nel lontano 1988 sulle BMW K100 – fatemelo dire con orgoglio di Kappista – divenne presto l’accessorio preferito dai clienti dell’Elica e dal 2012 equipaggia di serie tutti i modelli della Casa.
Poi sono arrivati il controllo di trazione, le manopole riscaldate, il cambio elettroassistito anche in scalata, il regolatore automatico della velocità e le altre decine di accessori disponibili a listino, grazie ai quali il prezzo di ogni singolo esemplare cresce di svariate migliaia di euro.
Ma la GS è anche un concentrato di scelte costruttive anticonformiste, che nel complesso la rendono davvero diversa nella guida da qualsiasi altra moto:
frenata integrale
motore boxer
trasmissione ad albero
sospensione posteriore Paralever
sospensione anteriore Telelever.
Vediamole in dettaglio.
1) Frenata integrale
Con il sistema frenante integrale che equipaggia le BMW R e K dotate di ABS fin dai primi anni Duemila, con la leva al manubrio si azionano entrambi i freni, mentre il pedale attiva il freno posteriore. È quindi impossibile azionare il solo freno anteriore e ciò comporta una serie di vantaggi interessanti:
semplifica la gestione dei freni, che possono essere azionati anche per frenate al limite con un unico comando, come sulle automobili;
elimina l’effetto autoraddrizzante tipicamente indotto dall’uso del solo freno anteriore in curva;
concorre a ridurre la tendenza della moto a picchiare in frenata[1];
Tutto questo senza impedire l’uso del solo freno posteriore, utile in determinate manovre quali le inversioni a U, i tornanti e per recuperare una curva presa troppo larga.
2) Motore Boxer
Le BMW sono da sempre riconoscibili fra tutte per le grosse testate del bicilindrico sporgenti dai fianchi, presenti solo in alcuni modelli dell’Est europeo nati come cloni dei sidecar BMW in dotazione alla Wehrmacht nazista. La produzione delle K con motori in linea iniziò nei primi anni ’80, ma ancora oggi parecchi affezionati le snobbano, considerandole sostanzialmente un errore di percorso.
Prima di elencare i pregi reali del boxer, cominciamo con lo sfatare un suo pregio immaginario, il mitico baricentro basso: sulle attuali BMW non è vero per niente.
Una volta questo tipo di motore veniva montato molto vicino al suolo e contribuiva effettivamente ad abbassare il baricentro rispetto ad altre soluzioni, ma l’aumentare della cilindrata – e quindi della larghezza già notevole di questa architettura – e la maggior possibilità di piega in curva offerta dagli pneumatici moderni hanno imposto un montaggio molto più in alto, innalzando il baricentro a livello sovrapponibile agli altri schemi motoristici.
A parte questo, il motore boxer offre alcuni vantaggi interessanti rispetto alle altre soluzioni a due cilindri – tralasciando il confronto con i mono, che vibrano troppo, e con i pluricilindrici, più pesanti.
Innanzitutto, trasmette molto meno calore, perché le testate sono relativamente lontane dal pilota e sono perfettamente esposte alla ventilazione dinamica.
Ma soprattutto, l’architettura a cilindri contrapposti è quella che garantisce la massima regolarità di rotazione, particolarmente ai bassi regimi, tradizionale punto debole dei bicilindrici. Qualsiasi bicilindrica con motore a V sotto i 3000 giri scalcia vistosamente, mentre il boxer BMW accetta tranquillamente di scendere sotto i 2000 in qualsiasi marcia anche con il gas al massimo, consentendo così al pilota di non preoccuparsi della marcia inserita: un grande vantaggio, specie per chi non è esperto della guida.
Il boxer ha anche qualche difetto. Oltre alla citata larghezza, va menzionata la coppia di rovesciamento prodotta dall’albero motore longitudinale, che all’aumentare dei giri – tipicamente sgassando in folle – tende a fare inclinare la moto da un lato. Questo problema è stato ridotto notevolmente sulle BMW dal 2004, inserendo un contralbero sotto all’albero motore, e praticamente eliminato dal 2013 con l’introduzione del nuovo motore raffreddato ad acqua, dove diverse componenti della trasmissione girano in senso inverso rispetto all’albero motore.
Tra parentesi, da Kappista faccio notare che lo stesso problema, che avrebbe dovuto affliggere anche i motori a 3 e 4 cilindri in linea della serie K, anch’essi con albero longitudinale, fu superato fin da subito brillantemente montando il volano sulla trasmissione primaria, e tutto questo nel 1983.
E a proposito di coppia di rovesciamento conseguente a una sgassata, se qualcuno vi dice che è dovuta all’albero cardanico – una delle tante chiacchiere da bar basate sul nulla, ma dure a morire – riflettete sul fatto che l’albero non ruota a moto ferma, guardate il tizio con commiserazione e passate oltre.
3) Trasmissione ad albero
Altre moto ne sono dotate, ma tra le endurone l’albero è una rarità e si ritrova solo pochi modelli fuori produzione, quali la Moto Guzzi Stelvio, la Yamaha Super Ténéré e la Honda Crosstourer.
La trasmissione cardanica ha il grande vantaggio di eliminare la necessità di dover pulire e lubrificare la catena ogni 500-1000 km, poco grave per il motociclista medio avvezzo a tale pratica, ma una seccatura notevole per chi proviene dalle auto o dagli scooter e in generale per chi fa molta strada.
4) Sospensione posteriore Paralever
In passato le trasmissioni ad albero imprimevano reazioni evidenti alla sospensione posteriore, estendendola in accelerazione e comprimendola in frenata. Il problema è stato risolto, guarda caso proprio da BMW, aggiungendo un braccio alla sospensione – che così diventa un quadrilatero – e un giunto cardanico tra l’albero e la coppia conica finale – prima ce n’era solo uno all’uscita del cambio.
Grazie a tali accorgimenti e a parastrappi ben fatti la trasmissione ad albero si comporta praticamente come una catena – simula perfino il tiro catena! – e non si nota minimamente alla guida, se non per la maggior silenziosità.
Chi dice il contrario, sicuramente non ha mai guidato una moto con trasmissione ad albero di questo tipo.
5) Sospensione anteriore Telelever
Esistono altre moto con il motore boxer o con la trasmissione ad albero e la sospensione posteriore a quadrilatero, ma nessuna moto diversa da una BMW R o K ha la sospensione anteriore Telelever[2].
Come è noto, questo schema consente alla sospensione di non affondare in frenata o comunque di comprimersi in modo molto limitato. Tale effetto è ottenuto non attraverso la frenatura dell’idraulica e il conseguente peggior assorbimento delle sconnessioni in frenata – come avveniva su alcune moto giapponesi del passato – bensì mediante una particolare geometria della sospensione, che impedendo l’accorciamento dell’interasse in frenata, ostacola anziché favorire la compressione dovuta al trasferimento di carico, ma lascia libera la sospensione di assorbire le sconnessioni della strada.
Dato che la sospensione non è soggetta se non marginalmente al trasferimento di carico, è possibile adottare un ammortizzatore estremamente morbido, che assorbe le sconnessioni in modo molto efficace, a un livello irraggiungibile su una forcella normale, a meno di non renderla troppo cedevole per una guida sportiva.
I vantaggi di questo comportamento sono notevoli:
la ruota copia perfettamente le sconnessioni, trasmettendo sollecitazioni minime sul manubrio;
l’assetto della moto rimane sostanzialmente piatto in frenata, perfino strizzando la leva con forza, e questo consente:
di entrare pinzati con l’anteriore in curva senza il minimo problema;
di frenare con l’anteriore anche in modo maldestro senza ripercussioni negative, anche in curva;
una guida molto redditizia e mentalmente non impegnativa;
un confort di marcia ineguagliabile per pilota e passeggero, molto meno soggetti a scossoni e variazioni d’assetto anche nella guida sportiva;
la mancata riduzione dell’interasse in frenata, tipica della forcella tradizionale, aumenta notevolmente la stabilità della moto, anche nelle staccate assassine;
è possibile applicare in modo pressoché istantaneo la forza frenante sulla ruota anteriore, cosa di solito resa impossibile dalla necessità di attendere la completa compressione della sospensione, con drastica riduzione del rischio di bloccaggi da panic-stop (oggi comunque scongiurati dall’ABS).
I detrattori del Telelever affermano che esso impedirebbe di percepire il comportamento della ruota anteriore, particolarmente nella guida sportiva. Beh, dopo una vita di prove e comparazioni, posso serenamente affermare che questa è una fesseria. Prova ne sia il fatto che chi guida un GS tende ad andare più veloce che con altre moto, il che vuol dire che la moto gli dà più confidenza. Questa sospensione è semplicemente diversa, e come tutte le cose diverse, richiede di rivedere le proprie convinzioni, esercizio non facile per alcuni.
Conclusione
Insomma, tutte queste caratteristiche concorrono a fare della GS una moto facile da acquistare e da mantenere, comoda per viaggiare e facilissima da guidare, tanto da essere davvero a prova di errore. Capacità di guida relativamente limitate sono sufficienti per farla andare forte e con un impegno mentale particolarmente ridotto; ecco perché chi la prova, di solito se ne innamora.
Insomma, se avete una GS, quella vera, avete fatto un buon acquisto.
Se non ce l’avete, che aspettate a provarla?
[1] Nel caso della GS è più corretto usare il condizionale, perché la presenza della sospensione Telelever, di cui si parlerà più avanti, già di suo determina l’effetto descritto, tra le varie cose.
[2] Esiste uno schema diverso dagli effetti molto simili – la sospensione a quadrilatero Hossack (Duolever) – che equipaggia le BMW K più recenti (1200, 1300 e 1600) e la nuova Honda Goldwing.
Ah già era una rondine scusate ma, che diamine, smetterà di piovere e finalmente la stagione che tutti noi motociclisti aspettiamo per mesi col naso all’insù arriverà, resistete!!
Io i sintomi primaverili ce li ho già, non si tratta proprio di quelli comuni a tutti all’arrivo della stagione. Di solito, se non si è affetti da morbo motociclistico grave come il sottoscritto, i sintomi standard sono dei classici: occhi rossi, naso congestionato per via del polline e cosi via, tutte cose che con una buona dose di antistaminici ci lascia in pace. Io invece ne ho di più specifici, magari ci fossero delle pillole! Iniziano di solito al lunedì, quando già so che passerò i seguenti cinque giorni con una domanda fissa in mente: “Dove vado con la moto sabato?” Poi devo resistere fino al venerdì, ma cacchio, la settimana è lunga e interminabile! Tento di sopravvivere alla routine quotidiana, fingendomi interessato ai discorsi al bar tipo quanto corre Gervinho o quanto sia gnocca o meno l’ultima entrata nella casa del Grande Fratello mentre la testa è già in giro per curve e tornanti. Il mio PC sembra una stazione meteo, confronto e controllo di continuo. Incrocio dati puramente scientifici ma nel frattempo chiamo anche zia per sentire se il famoso callo che le duole quando piove si è fatto sentire ultimamente! Poi resta la cosa più difficile: schivare, con abilità seconda solo a un diplomatico di fama internazionale, inviti vari da suocere, mamme, compleanni, battesimi e matrimoni, perché il resto del mondo sembra non capire l’equazione più facile del mondo: sabato+non lavoro+sole= esco con la moto! Mica è difficile, non trovate?
Scherzi a parte l’inverno è stato come sempre lungo e freddo. Come lo avete trascorso? Avete usato lo stesso la vostra moto? O l’avete messa a riposo in attesa della stagione buona? In entrambi i casi vediamo cosa è bene controllare prima di iniziare ad usare nuovamente con più frequenza la nostra amata due ruote. Diciamo che si può parlare di ispezioni e controlli che, mi raccomando, è bene fare da soli se si possiedono le capacità per farlo, altrimenti rivolgiamoci al nostro meccanico di fiducia. Fermo restando che si parla di mezzi che sono stati fermi per qualche mese e non di rimessa in marcia di mezzi in disuso da tempo.
Dividiamo il tutto in quattro macrocategorie: Motore, Trasmissione, Freni e Pneumatici.
Motore:
Controllare lo stato di carica della batteria. Si può fare con un tester o con dei dispositivi dedicati in vendita presso i negozi di ricambi che forniscono un’indicazione in percentuale o più semplicemente anche solo una luce verde e una rossa. In caso fosse scarica procediamo prima a ricaricarla per evitare di mandarla definitivamente a terra al primo tentativo di accensione. Se di tipo sigillato limitarsi alla ricarica, se di tipo tradizionale controllare anche che il livello dell’acido sia adeguato a coprire le piastre prima di ricaricarla. Se siete stati previdenti ed avete lasciato il vostro mezzo collegato ad un mantenitore di carica saltate pure questo controllo.
Controllare il livello del liquido di raffreddamento. Ispezionare il livello del liquido di raffreddamento controllando che sia nei parametri previsti dalle tacche presenti sulla vaschetta di recupero. Controllare poi il livello dell’olio motore o sostituirlo se al momento dello stop si era già vicini all’eventuale sostituzione.
Pulire il filtro dell’aria. Una bella soffiata o un lavaggio in caso abbiate installato un filtro lavabile. Il filtro è il polmone del nostro motore e senza la giusta quantità e qualità dell’aria tutti i parametri dell’alimentazione motore si alterano.
Trasmissione:
Controllare lo stato della trasmissione. In caso di trasmissione a catena verificarne il corretto tensionamento e lo stato di pulizia e ingrassaggio. Se a tatto il vecchio grasso si è seccato sulla catena formando una crosticina rimuoverlo con un pulitore per catene spray dedicato alle catene con o-ring e rimuovere tutto lo sporco con uno spazzolino o straccio. A pulizia effettuata ingrassare nuovamente la catena ripetendo l’operazione di ingrassaggio al rientro dal primo utilizzo.
Freni:
Controllare il livello di usura delle pasticche. Verificare che ci sia la quantità di materiale frenante adeguato per affrontare i primi utilizzi ispezionando visivamente le pasticche e in caso negativo sostituirle. Nell’immagine si nota la differenza tra una pasticca consumata (a) e una nuova (b).
Controllo olio impianto frenante. Un corretto funzionamento dell’impianto frenante è strettamente legato alle condizioni di questo fluido. L’olio dei freni è fortemente igroscopico, tende cioè ad accumulare umidità, che durante l’utilizzo si trasforma in vapore acqueo, restituendo una frenata meno efficace o, come si dice in termine tecnico, un po’ “spugnosa”. E’ buona norma cambiarlo dopo uno stop prolungato procedendo a sostituirlo con dell’olio nuovo proveniente da un contenitore sigillato del tipo raccomandato per la vostra moto (è scritto sul tappo del serbatoio del liquido freni, posto presso ciascuna pompa). Questa operazione può essere eseguita da soli solo se in grado di farlo, mi raccomando.
Pneumatici:
Controllare la pressione. Verificare la pressione degli pneumatici che a causa dello stop, ed anche in caso di moto sollevata sui cavalletti, potrebbe essere scesa anche di molti bar. Riportarla alla pressione adeguata (di solito compresa tra 2,2 e 2,9 bar) e comunque tenendo conto di quanto raccomandato sul libretto d’uso della vostra moto.
Ispezionare gli pneumatici visivamente. Controllare che sulla superficie della gomma e soprattutto sulla spalla non si siano formate screpolature o spaccature. Tali segnali vanno interpretati come un indurimento della mescola a prescindere dal chilometraggio effettuato soprattutto se la moto è stata utilizzata poco. Altra indicazione utile è leggere il DOT della gomma, un numero a quattro cifre che indica la settimana e l’anno di produzione dello pneumatico. Se la gomma risulta datata a prescindere dal reale utilizzo chilometrico, se ne consiglia ugualmente la sostituzione.
Pochi semplici, ma doverosi controlli che spettano al bravo proprietario. Ricordatevi sempre di non inquinare e di smaltire i materiali sostituti negli appositi punti di raccolta, mi raccomando.
Ora non vi resta che capire se il prossimo week end ci sarà il sole e godervi una bella giornata in compagnia dei vostri amici e delle vostre moto.
È convinzione universale tra noi motociclisti che le moto leggere siano più veloci in curva di quelle pesanti. È un assioma e come tale è un fatto incontestabile: è così punto e basta, senza possibilità di replica. Sostenere qualche cosa di diverso porterebbe a fischi e ululati da stadio nella comitiva, seguiti da decine di esempi che dimostrano inequivocabilmente che le moto leggere curvano come saette e girano intorno a quelle pesanti in tutte le curve e in particolare nel misto stretto.
Ma siamo proprio sicuri sicuri che le cose stiano davvero così?…
Prendiamo due moto diverse nel peso, ma identiche in tutte le altre caratteristiche: interasse, luce a terra, posizione del baricentro, geometria delle sospensioni, dimensioni dei cerchi e degli pneumatici ecc., e domandiamoci come influisce la differenza di peso in curva.
La prima domanda da farci è se tale differenza comporta, a parità di velocità di percorrenza e raggio di sterzata, una differenza nell’inclinazione della moto. Se così fosse, chiaramente ci sarebbe un vantaggio per la moto che si inclina meno, perché essa all’inclinazione massima, quella in cui gratta tutto il grattabile, andrebbe più veloce.
Ora, per qualsiasi moto, a una determinata velocità di percorrenza di una curva di dato raggio corrisponde un preciso angolo di inclinazione del sistema moto + pilota, in base alla seguente formula:
α = arctan (v²/(r ∙ g))
dove α è l’angolo cercato rispetto alla verticale, v è la velocità, r il raggio della traiettoria curva e g l’accelerazione gravitazionale.
Come si vede, il peso nella formula non c’è, quindi esso non concorre a determinare l’angolo; di conseguenza, una moto leggera e una pesante, a parità di tutte le altre caratteristiche, piegano esattamente con lo stesso angolo nel percorrere la stessa traiettoria curva alla stessa velocità.
Domandiamoci allora se il peso influisce sulla tenuta di strada. In altre parole, proviamo a capire se un peso maggiore diminuisce la capacità delle gomme di restare incollate al suolo senza derapare durante una curva.
Innanzitutto, è intuitivamente evidente che una moto più pesante oppone una maggior inerzia al cambiamento di traiettoria e quindi sviluppa una forza centrifuga maggiore.
La formula della forza centrifuga è la seguente:
Fc = (m ∙ v²)/r
dove m è la massa del sistema moto + pilota, v è la velocità e r il raggio della traiettoria curva.
Come si vede, la forza centrifuga cresce linearmente al crescere della massa. Quindi in curva gli pneumatici devono contrastare una forza tanto maggiore, quanto più il sistema moto + pilota è pesante.
Dobbiamo quindi chiederci se e come varia l’aderenza degli pneumatici all’aumentare della massa.
L’aderenza, vale a dire la forza di attrito che uno pneumatico può offrire, dipende dal coefficiente di attrito, cioè dalla capacità del battistrada di aderire al suolo in presenza di forze applicate tangenzialmente rispetto ad esso, e dal carico gravante sulla ruota, secondo la seguente formula:
Fa = Ca ∙ c
dove appunto Fa è la forza di attrito, Ca è il coefficiente d’attrito della data gomma su una data superficie e c è il carico gravante su di essa.
Come si vede dalla formula, l’aderenza dipende linearmente dal carico che grava sulla gomma, che a sua volta è funzione lineare del peso. Ne consegue che anche l’aderenza aumenta linearmente con l’aumentare del peso.
Ricapitolando, a parità di altre caratteristiche, all’aumentare del peso:
l’inclinazione in curva della moto non cambia;
la forza centrifuga aumenta linearmente con il peso;
l’aderenza aumenta linearmente con il peso.
Perciò, dato che l’aderenza aumenta esattamente come la forza centrifuga e che quindi il rapporto tra le due resta costante al variare del peso, accade che la velocità massima con cui una data moto può percorrere una data traiettoria curva non dipende dal suo peso, a parità di altre caratteristiche. In altre parole una moto leggera e una pesante, a parità di altre caratteristiche, riescono a percorrere una traiettoria curva di uguale raggio alla stessa velocità.
Sorprendente, no? Eppure è così.
Ma le moto leggere vanno davvero più forte di quelle pesanti nel misto!
Sì, è vero, ma ciò dipende da tutta una serie di fattori, che vedremo in un prossimo articolo.
Viaggi in moto – Corsi guida sicura – Motorcycle Tours in Italy and Europe