

Dai un’occhiata ai nostri Corsi di Guida Sicura, ai nostri Tour in Moto e ai nostri Tour in Miata!
La parte I di quest’articolo, pubblicata originariamente il 17 luglio 2021, è stata modificata il 10 luglio 2022 e nuovamente rielaborata tra il 17 e il 19 luglio dello stesso anno. Tra queste date ho acquisito maggior consapevolezza di alcuni aspetti della dinamica della moto, che mi hanno permesso di rendere più chiara, semplice e precisa sua la descrizione e di eliminare alcuni errori che avevo commesso nell’interpretare certi fenomeni.
Ringrazio Federico Canegiallo (https://www.giornalemotori.com/) per tutte le spiegazioni che ha avuto la pazienza di darmi e spero che questo mio scritto sia ora inattaccabile ai suoi occhi. 🙂
Premessa
Questo articolo ha lo scopo di descrivere il comportamento della moto in curva su strada e i modi che abbiamo per modificarlo. È più approfondito del solito e quindi è molto lungo. Per renderlo più digeribile, l’ho diviso in due parti:
Parte 1 – Sterzata e spostamento laterale del corpo
Parte 2 – Variazioni di velocità in curva
Ogni parte inizia con un capitolo in cui sono trattate le nozioni di dinamica della moto necessarie per comprendere i comportamenti descritti nel seguito. L’argomento non è trattato da un punto di vista matematico, ma solo qualitativo, perciò è comprensibile da chiunque, purché abbia tempo e voglia di leggere e capire.
Ho deciso di descrivere come si fanno le curve in moto, perché il web è pieno di articoli e di video su questo argomento, ma che in gran parte contengono errori. I peggiori poi sono vere e proprie schifezze, in cui si raccontano frescacce del tutto prive di senso, magari da gente che non sa assolutamente niente di dinamica della moto e lo ammette anche pubblicamente, con frasi tipo “io non ho la più pallida idea del perché avvenga questo, ma è così, prendetelo come un dogma”.
Leggendo i commenti a tali video, si trovano persone che li criticano, ma anche tante altre che ringraziano l’autore per avergli chiarito i loro dubbi… Questi motociclisti meritano di più, sono appassionati in cerca di risposte alle proprie domande e portarli fuori strada con spiegazioni senza senso è il peggior servizio che si possa rendere alla loro passione e alla loro sicurezza. Quest’articolo è anche per loro, o almeno per quelli tra loro che vorranno leggerlo e capirlo fino in fondo.
Sterzata e spostamento laterale del corpo
1 Equilibrio dei veicoli a due ruote
1.1 I primi tentativi
Per quasi tutta la sua lunghissima storia, l’umanità non ha mai neanche immaginato la possibilità di muoversi su veicoli a due ruote. Quest’idea cominciò a formarsi solo a cavallo tra il XVIII e il XIX secolo, in piena Rivoluzione industriale, quando le invenzioni in tutti i campi cominciarono a susseguirsi a ritmo sempre più vertiginoso.
Durante i primi tentativi ci si accorse subito che questi mezzi non erano intrinsecamente stabili e richiedevano doti non comuni alla guida, perciò fu subito chiaro che, se si voleva favorirne la diffusione, era necessario fare in modo che potessero rimanere in equilibrio il più possibile automaticamente, cioè senza intervento del pilota. Non a caso la prima bicicletta prodotta su larga scala, la “Rover” del 1885, aveva questa caratteristica – e tante altre – ripresa in tutte le biciclette successive e poi in tutte le moto fino ai nostri giorni.
Nei prossimi paragrafi vedremo come fanno i veicoli a due ruote allineate a stare in equilibrio automaticamente, cioè a essere autostabili.
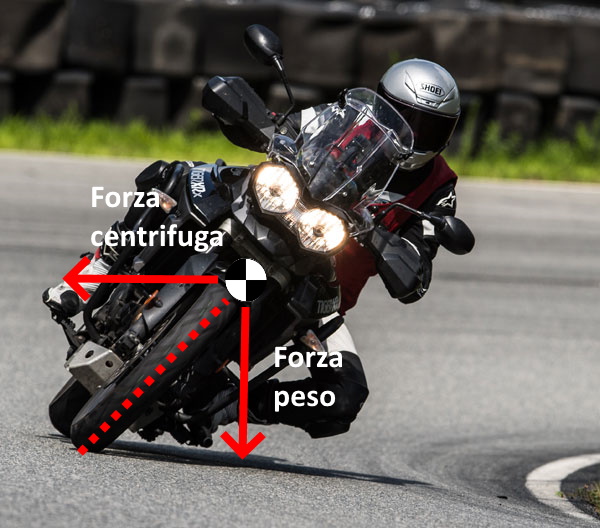
1.2 Bilanciamento tra forza peso e forza centrifuga
Per mantenersi in equilibrio, un veicolo a due ruote deve sterzare nella direzione verso cui eventualmente è inclinato, in modo che la forza centrifuga [1] risultante lo spinga verso l’esterno della curva e compensi così la sua forza peso, che invece lo fa cadere verso l’interno. Se queste due forze sono in equilibrio, il veicolo mantiene costante il proprio assetto, altrimenti esso varia la propria inclinazione. In particolare:
- se la sterzata è eccessiva, il veicolo tenderà a raddrizzarsi, per poi inclinarsi dalla parte opposta
- se la sterzata è insufficiente, il veicolo tenderà a inclinarsi sempre di più.
Se si ragiona un pò su quanto detto sopra, appare chiaro che, per rendere autostabile un veicolo del genere, sono necessarie due cose:
- quando il veicolo si inclina da un lato, la ruota anteriore deve sterzare automaticamente e progressivamente dalla parte dell’inclinazione, ma un po’ troppo, in modo da generare un po’ di più della forza centrifuga strettamente necessaria per bilanciare la forza peso e così riportare automaticamente il veicolo in posizione verticale
- man mano che il veicolo ritorna in posizione verticale, la ruota anteriore deve ritornare automaticamente e progressivamente nella posizione centrale, per evitare che il veicolo si inclini nella direzione opposta.
Il comportamento dello sterzo è dunque la chiave di tutto; se si riesce a farlo funzionare in questo modo, è fatta.
1.3 Fenomeni giroscopici
Le ruote della moto sono giroscopi, in quanto ruotano intorno a un asse di rotazione – il mozzo – sono simmetriche rispetto ad esso e hanno un’elevata inerzia, dovuta al loro diametro e al fatto che buona parte della propria massa è concentrata lungo la circonferenza – il cerchione e lo pneumatico. Come tali, esse sono soggette a fenomeni giroscopici di vario tipo, che hanno un ruolo fondamentale nella dinamica dei veicoli a due ruote. Nel seguito sono descritti i due fenomeni che ci interessano maggiormente.
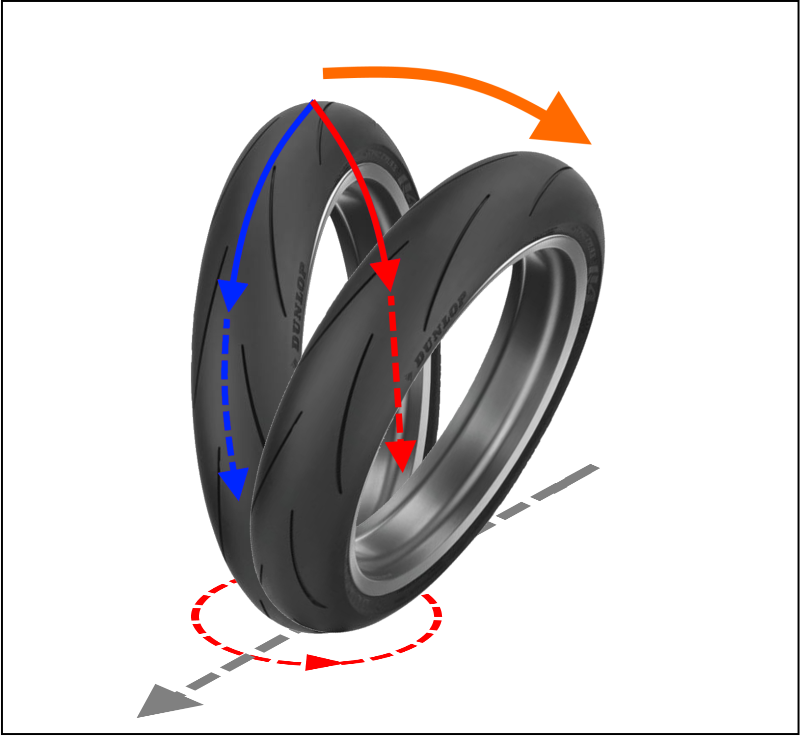
a. Effetto giroscopico in fase di inclinazione del veicolo
Quando un veicolo a due ruote allineate si inclina, la sua ruota anteriore sterza automaticamente dalla parte dell’inclinazione [2].
Per esempio, durante un’inclinazione a sinistra, la massa del punto più alto della ruota – che è quello che durante l’inclinazione si muove più velocemente – sarà spinta verso sinistra dall’inclinazione crescente, perciò acquisirà una traiettoria diagonale diretta verso sinistra (frecce rosse) e tenderà a proseguire per inerzia lungo tale traiettoria. Essa però sarà costretta a seguire la circonferenza e quindi a rientrare verso destra, perciò tirerà la ruota a sterzare verso sinistra.
Questo fenomeno può essere simulato facilmente con una ruota di bicicletta tenuta in rotazione fra le mani.
b. Effetto giroscopico durante una curva a inclinazione costante
Durante la percorrenza della curva, quando il veicolo a due ruote ha raggiunto e mantiene un angolo di inclinazione costante, il fenomeno giroscopico descritto al precedente punto a, proprio di una ruota che si sta inclinando, cessa di manifestarsi. In assenza di altri effetti, la ruota a questo punto dovrebbe smettere di sterzare e quindi, per inerzia giroscopica, dovrebbe mantenere costante la direzione del proprio asse e proseguire dritta. Dato che, invece, continua a curvare, c’è qualcos’altro che ne determina il comportamento. La ragione di ciò sta nel fatto che, una volta che la moto sta curvando con un’inclinazione costante, la ruota anteriore non assume una traiettoria rettilinea uniforme, ma è inclinata e contemporaneamente sta traslando lateralmente per seguire la traiettoria curva. Per tale ragione si verifica quanto segue.
- La massa del punto superiore della ruota – quello più interno alla curva – durante il movimento roto-traslatorio della ruota stessa è costretto a seguire la circonferenza verso l’esterno e quindi a subire una forza centrifuga minore rispetto a quella della moto, ma per inerzia vorrebbe muoversi insieme a questa e quindi tira la parte anteriore della ruota verso l’interno della curva.
- Simmetricamente, La massa del punto inferiore della ruota – quello più esterno alla curva – durante il movimento roto-traslatorio della ruota stessa è costretto a seguire la circonferenza verso l’interno e quindi a subire una forza centrifuga maggiore rispetto a quella della moto, ma per inerzia vorrebbe muoversi insieme a questa e quindi tira la parte posteriore della ruota verso l’esterno della curva.
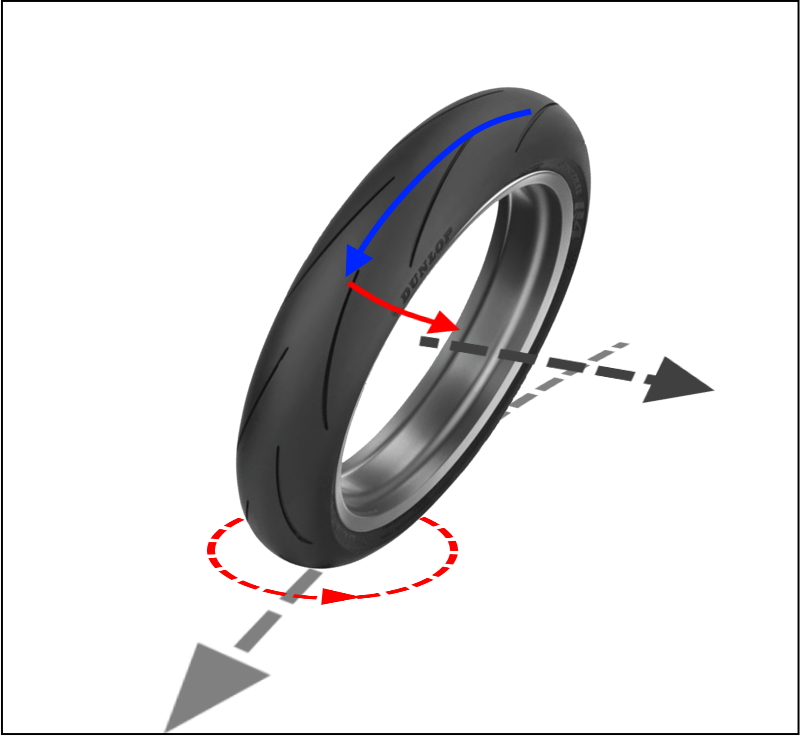
Il risultato di questo fenomeno è che la ruota anteriore di un veicolo a due ruote continua a sterzare verso la curva anche quando l’inclinazione dello stesso rimane costante.
SI noti che, a differenza del precedente, questo fenomeno non può essere simulato in modo efficace tenendo in mano una ruota di bicicletta mentre si sta in piedi, perche in questo modo viene sostanzialmente a mancare la traslazione della ruota verso l’interno della curva.
c. Effetto complessivo dei due fenomeni giroscopici
Nel complesso, i due fenomeni giroscopici a. e b. descritti sopra consentono alla moto di curvare quando si inclina, di mantenere sterzata la ruota anteriore durante la curva e di riportare lo sterzo verso il centro quando la moto si raddrizza. Ma allora, visto che la ruota anteriore si comporta proprio come dovrebbe, perché i primi bicicli avevano problemi di equilibrio? Perché tali effetti si manifestano in modo eccessivamente brusco, se lo sterzo non è dotato di un’adeguata avancorsa.
1.4 Avancorsa
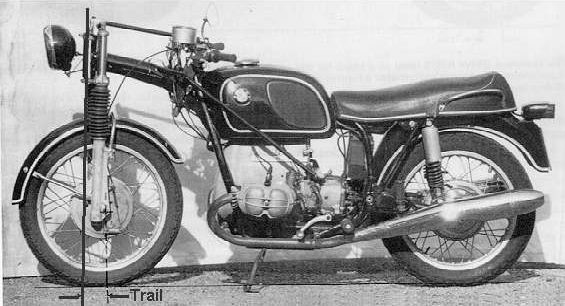
L’avancorsa è la distanza tra il punto in cui l’asse di rotazione dello sterzo interseca il piano su cui poggia la moto e il centro dell’impronta a terra dello pneumatico anteriore. Si dice:
- avancorsa positiva quando l’asse di sterzo cade davanti al punto di appoggio della ruota anteriore
- avancorsa negativa quando cade dietro di esso
- avancorsa nulla quando i due punti coincidono.
Tutti i veicoli a due ruote moderni sono caratterizzati da un’avancorsa positiva. Infatti, essa offre due vantaggi fondamentali, senza i quali nessun veicolo a due ruote allineate potrebbe essere autostabile.
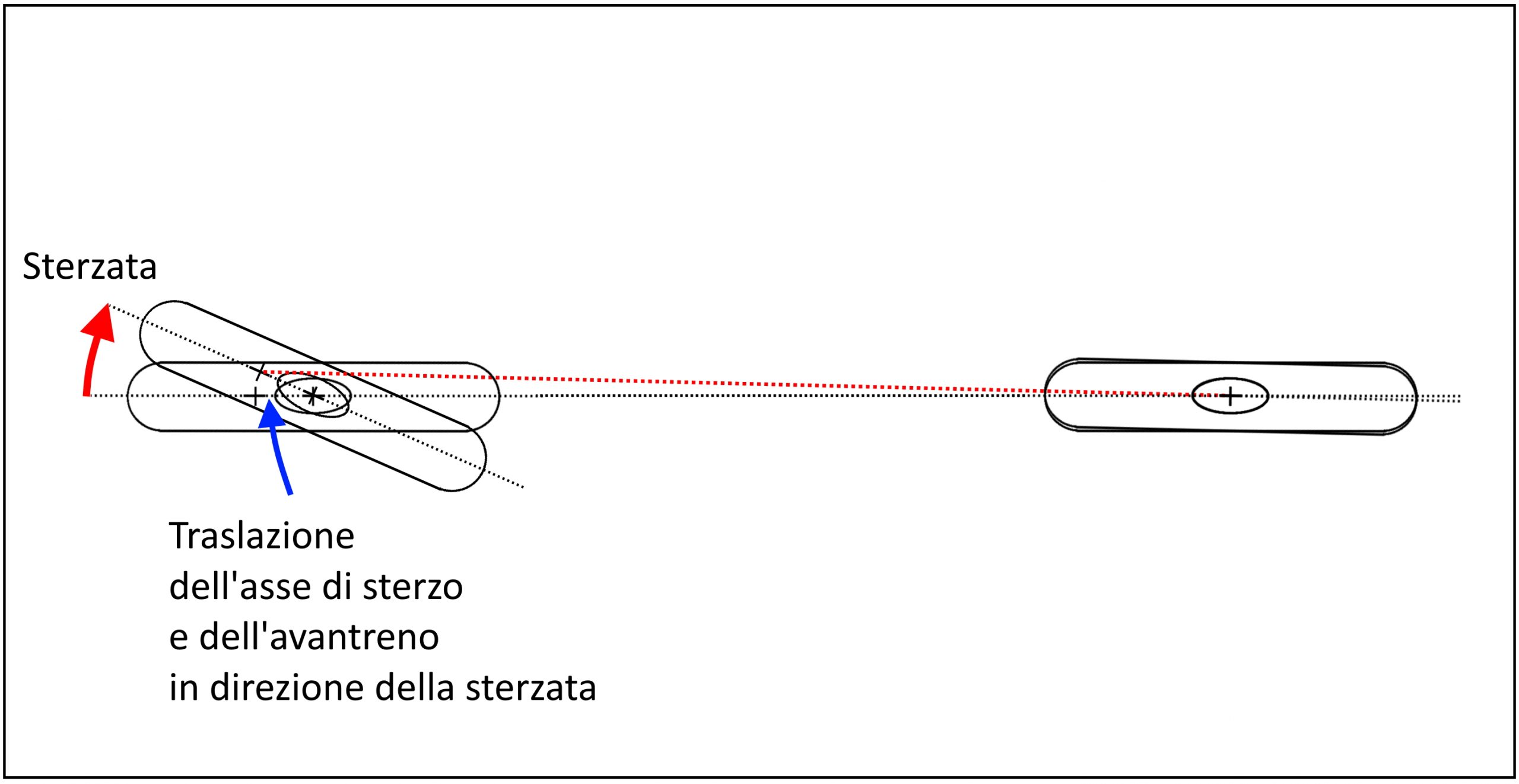
- Un’avancorsa positiva rende lo sterzo più pesante da azionare, specialmente al crescere della velocità, e quindi impedisce al pilota di agire troppo bruscamente su di esso e mettere in grave rischio la stabilità. Ciò avviene, perché azionando lo sterzo, l’avantreno della moto trasla lateralmente in direzione della sterzata (si veda la successiva figura 5), opponendosi a questa con la propria inerzia. In tal modo, l’avancorsa:
- in rettilineo, contribuisce a mantenere la ruota anteriore allineata al centro
- all’inclinarsi della moto, limita la sterzata automatica della ruota indotta dagli effetti giroscopici descritti sopra.
- Quando un veicolo si inclina e la sua ruota anteriore sterza nella direzione della curva, per una semplice ragione geometrica il punto di contatto di tale ruota con il suolo si sposta in avanti. In assenza di un’adeguata avancorsa, al crescere dell’angolo di inclinazione si viene a creare un’avancorsa negativa e ciò determina l’immediata sterzata a battuta della ruota verso l’interno. Per farsi un’idea del fenomeno, basti dire che ciò è quanto avviene sui veicoli a due ruote moderni quando si tenta di salire obliquamente su un gradino.
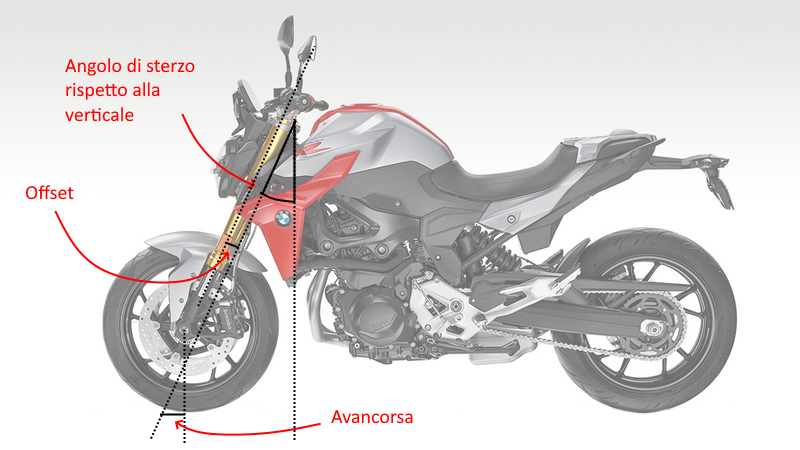
Sulle moto moderne l’avancorsa si aggira di solito intorno ai 100 mm e varia in base alle caratteristiche di ciascun modello e all’uso a cui è destinato. Come si può vedere dalla figura 3 sopra, essa dipende:
- dall’offset, che è la distanza tra l’asse di sterzo e il piano ad esso parallelo e passante per l’asse della ruota anteriore
- dall’angolo di inclinazione dell’asse di sterzo.
Combinando opportunamente questi parametri, è possibile ottenere l’avancorsa desiderata con una grande varietà di angoli di inclinazione dell’asse di sterzo, dalla BMW R75/5 di Tony Foale con sterzo verticale ai chopper con sterzo quasi orizzontale.

I primi bicicli stavano in equilibrio precario, appunto perché avevano sterzo quasi verticale e privo di offset e quindi avevano avancorsa prossima allo zero.

Il comportamento autosterzante della moto è influenzato da parecchie caratteristiche, tra cui le seguenti:
- avancorsa (aumentandola, diminuisce la tendenza della ruota a sterzare)
- peso della ruota anteriore, dischi inclusi (aumentandolo, aumenta la tendenza della ruota a sterzare)
- diametro della ruota anteriore (idem)
- inclinazione dell’asse di sterzo rispetto alla verticale, a parità di avancorsa (aumentandola, diminuisce la tendenza della ruota a sterzare)
- peso gravante sulla ruota anteriore (aumentandolo, diminuisce la tendenza della ruota a sterzare)
- peso delle masse poste alle estremità del manubrio (idem).
È chiaro che qualsiasi modifica apportata a questi elementi senza cognizione di causa può variare notevolmente il comportamento della moto e in casi estremi può persino renderla incontrollabile.
È infine importante notare che il comportamento autosterzante di un veicolo a due ruote si basa sul fatto che le ruote abbiano sufficiente aderenza per non derapare. Una sbandata della moto dovuta a perdita di aderenza comporta la rottura dell’equilibrio automatico, può richiedere correzioni attive da parte del pilota e può portare anche alla caduta della moto.
2 Gestire la traiettoria con lo sterzo
2.1 Come funziona
Quando siete al volante di un’auto e sterzate da una parte, gli pneumatici generano a livello dell’asfalto una forza centripeta, che tende cioè a spostarli lateralmente nella direzione della sterzata, mentre il baricentro dell’auto, che è situato più in alto, tende ad andare dritto per inerzia. La combinazione di queste due forze genera un momento che fa inclinare l’auto in direzione opposta rispetto alla sterzata.

Questo effetto si verifica su qualsiasi veicolo che poggia su ruote e quindi anche sulle moto: se si sterza da una parte, la moto si inclina dall’altra. Una volta che la moto si inclina dalla parte “sbagliata”, per le ragioni viste nel paragrafo 1, la ruota anteriore sterza nella stessa direzione e la moto inizia a percorrere la curva.
Si noti che queste fasi si susseguono automaticamente con grande rapidità e, a parte l’impulso iniziale 1, senza alcun intervento del pilota. Non è affatto vero che per inserirsi in curva si debba sterzare prima da una parte e poi dall’altra: bisogna continure a premere sempre nella stessa direzione, poi la precessione giroscopica e l’avancorsa fanno tutto il resto [4].
Ora, se per curvare dovessimo pensare di dover sterzare al contrario, diventeremmo pazzi. Perciò conviene vedere la cosa in modo più intuitivo: per inclinare la moto in una direzione, basta premere in avanti la manopola da quel lato, e più forte sarà la pressione, più la moto si inclinerà e più curverà stretta. Ecco perché questa tecnica è chiamata in inglese push-steering, che vuol dire appunto “sterzata mediante spinta”[3].
Da quanto detto nel paragrafo 1, ricordiamo che un’avancorsa ben dimensionata fa sì che la precessione giroscopica faccia sterzare la ruota nella direzione dell’inclinazione di quel tanto che basta, da rendere la forza centrifuga lievemente eccedente rispetto alla forza peso, in modo da autostabilizzare la moto. Per tale ragione, se si vuole continuare a curvare, occorre continuare a premere sulla manopola interna, altrimenti la moto ritorna in posizione verticale e riprende la marcia rettilinea.
Il push-steering funziona sia a moto dritta che a moto inclinata, quindi esso consente sia di iniziare una curva, sia di variare l’inclinazione e quindi la traiettoria della moto durante una curva. In ogni caso, basta semplicemente:
- premere su una manopola, per iniziare a curvare nella direzione dove si preme
- premere maggiormente sulla manopola interna, per stringere la traiettoria
- smettere di premere sulla manopola interna, per allargare la traiettoria.
Il video seguente illustra il funzionamento su strada di questa tecnica. Per chiarezza, le mani sono tenute aperte, senza impugnare le manopole, in modo da rendere visivamente chiaro che esse spingono.
Sperimentare l’efficacia del push-steering alla guida è piuttosto semplice. Lungo un rettilineo, piazzatevi a una velocità media – 60-70 km/h va benissimo – togliete la mano sinistra dal manubrio e con la destra spingete la manopola in avanti – cioè sterzate verso sinistra; vi accorgerete che la moto curverà subito verso destra.
Il push-steering non funziona alle bassissime velocità, allorché lo sterzo va azionato dalla parte giusta. Perché? Come abbiamo visto sopra, la sospensione anteriore delle moto è caratterizzata dalla presenza dell’avancorsa, a causa della quale la ruota poggia a terra più indietro rispetto all’asse dello sterzo. Per questa ragione, se si sterza a moto ferma o quasi, l’asse dello sterzo si sposta dalla parte della sterzata e con esso tutta la parte anteriore della moto. In questo modo la moto si sbilancia leggermente dalla parte della sterzata e quindi tende a cadere nella direzione della curva, di quel tanto che basta a vincere la ridottissima forza centrifuga.
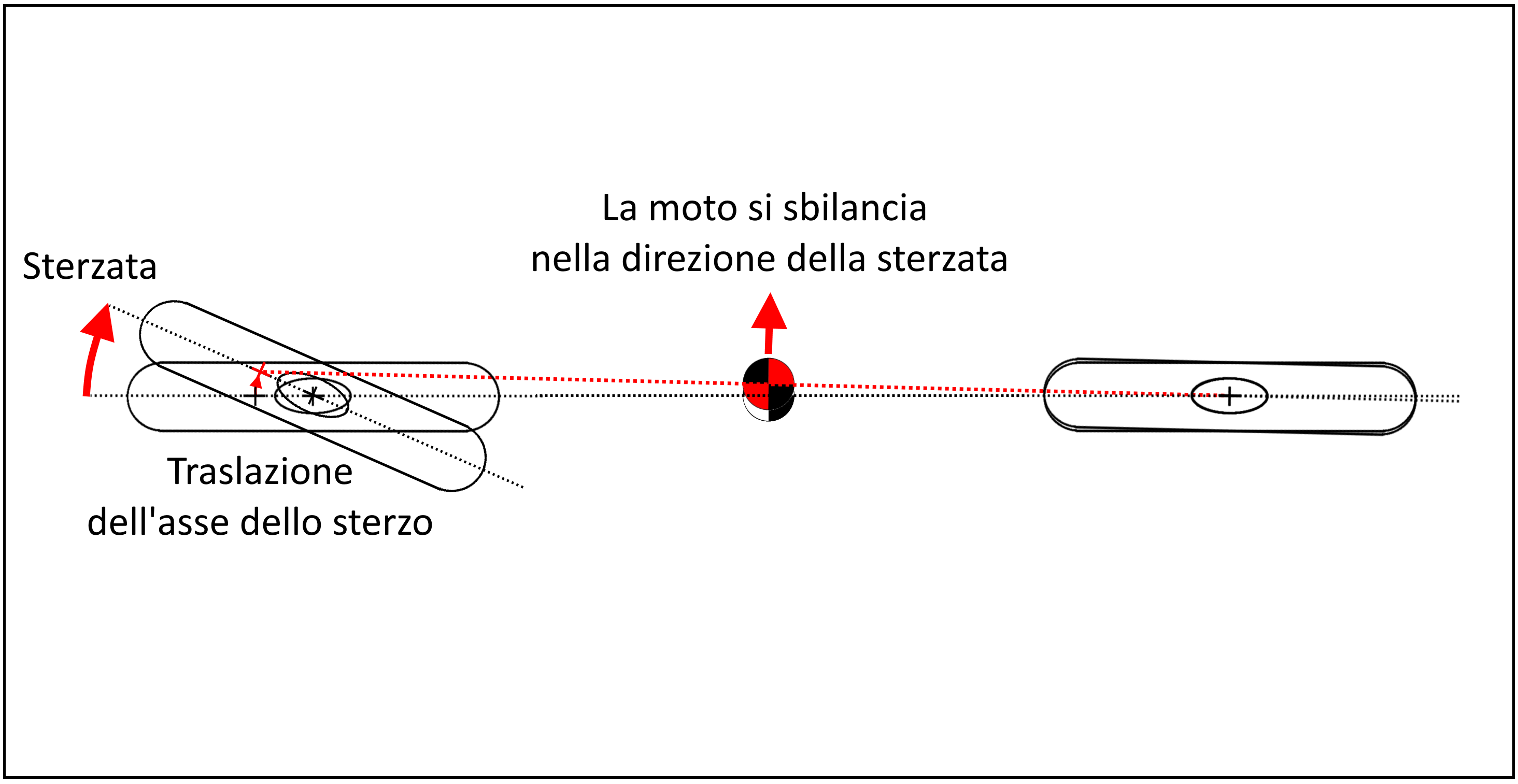
Quando invece la velocità supera una certa soglia limite – intorno ai 15-20 km/h, dipende principalmente dalla misura dell’avancorsa – la forza centrifuga prevale su questo effetto e il push-steering inizia a funzionare.
2.2 Pregi
Il push-steering:
- funziona sia a moto dritta che a moto inclinata
- è molto preciso
- consente di impostare qualsiasi traiettoria
- è efficace con qualsiasi tipo di moto, anche quelle più pesanti
- è rapido, anche se non istantaneo, per via della sterzata iniziale in senso contrario necessaria alle velocità normali, specialmente in sella a una moto pesante, perché la durata e l’ampiezza della fase iniziale negativa aumentano con l’aumentare della massa.
2.3 Difetti
Di suo, il push-steering non ha difetti. Esso però ha dei limiti nella guida veloce, che vengono superati combinando questa tecnica con lo spostamento del baricentro del pilota, come spiegato più avanti.
2.4 Quando si usa
Grazie a tali caratteristiche, la tecnica del push-steering è efficace per:
- impostare e percorrere qualsiasi traiettoria con grande precisione
- variare anche notevolmente una traiettoria a curva già impostata
- schivare un ostacolo improvviso, anche di grandi dimensioni.
Insomma, è una tecnica buona per tutti gli usi. Non a caso è usata da tutti i motociclisti, anche quelli – la maggioranza – che non ne sono consapevoli. Alcuni di questi sono addirittura convinti di azionare lo sterzo dalla parte della curva, il che è semplicemente impossibile.
Ma anche se tutti usano il push-steering, esserne coscienti comporta due grandi vantaggi:
- consente di manovrare più efficacemente qualsiasi moto e in particolare quelle più pesanti
- consente di schivare molto più efficacemente gli ostacoli.
Chi invece non ne è cosciente, faticherà di più a controllare la moto e, soprattutto, reagirà al pericolo in modo meno efficace o addirittura controproducente. Ho visto con i miei occhi – e in un caso ero passeggero – motociclisti che, per evitare un ostacolo, gli finivano addosso nel tentativo di sterzare dalla parte opposta.
Ecco perché è fondamentale che tutti i motociclisti prendano coscienza del push-steering e imparino a sfruttarne le potenzialità.
3 Gestire la traiettoria con lo spostamento laterale del corpo del pilota
3.1 Come funziona
Se il pilota sposta il proprio baricentro lateralmente rispetto alla moto, contrariamente a quanto molti credono (me per primo, per lungo tempo), la moto non si inclina dalla parte verso cui il pilota si sporge, bensì nella direzione opposta. Ciò avviene per il principio di conservazione della quantità di moto, per il quale, in assenza di forze esterne al sistema moto + pilota, il baricentro del sistema stesso continua a muoversi per inerzia nella stessa direzione. Il pilota fa parte del sistema, per cui quando egli sposta il proprio baricentro da un lato, necessariamente il baricentro della moto si sposta dall’altro. Naturalmente, il tutto è influenzato dal rapporto tra il peso della moto e quello del pilota: più la moto è pesante rispetto al pilota, meno essa si inclinerà allo spostarsi di questo.
Come sappiamo, la precessione giroscopica, tenuta a bada dall’avancorsa, fa sterzare la ruota nella direzione dell’inclinazione della moto. Anche in questo caso, quindi, esattamente come nel caso del push-steering, la ruota sterza in direzione contraria a quella verso cui si vuole andare e perciò si realizza la stessa sequenza:
- la moto viene inclinata dalla parte sbagliata
- la ruota anteriore sterza dalla parte sbagliata
- la moto si sbilancia nella direzione giusta, cioè quella del busto
- la ruota anteriore per precessione giroscopica sterza nella stessa direzione
- la moto curva nella direzione voluta.
Da quanto detto nel paragrafo 1, ricordiamo che un’avancorsa ben dimensionata fa sì che la precessione giroscopica faccia sterzare la ruota nella direzione dell’inclinazione abbastanza, da rendere la forza centrifuga lievemente eccedente rispetto alla forza peso, in modo da autostabilizzare la moto. Per continuare a curvare, occorre quindi continuare a sporgersi verso l’interno per mantenere la moto più sollevata e quindi diminuire leggermente la sterzata della ruota anteriore.
Alcuni definiscono questa tecnica “premere sulle pedane”, ma è una denominazione impropria, perché se si fa solo questo, senza spostare il busto, non succede assolutamente nulla. Spostando il busto e scaricando il peso sulla pedana si ottiene un maggior spostamento del pilota, un maggior spostamento in senso opposto del baricentro della moto e quindi una maggior efficacia della manovra.
Molti motociclisti affermano di curvare in questo modo, ma in realtà non spostano il corpo in maniera significativa e curvano con il push-steering. Ma anche quelli che effettivamente spostano il corpo, senza volerlo applicano quasi sempre anche forze longitudinali sulle manopole e quindi combinano lo spostamento del proprio baricentro con il push-steering. L’unico modo per curvare con questa tecnica “in purezza” consiste nel metterla in pratica senza le mani sul manubrio. Se ci provate – lungo un tratto senza traffico in discesa o inserendo il cruise control – scoprirete quanto effettivamente la vostra traiettoria nella guida di tutti i giorni è dovuta al modo in cui spostate il vostro baricentro e quanto invece alla vostra azione sullo sterzo. Se pensavate che tutto il merito andasse al vostro tuffarvi con il corpo nelle curve, rimarrete profondamente delusi.
Il video che segue illustra il funzionamento di questa tecnica, senza mani, per verificarne la reale efficacia.
3.3.2 Pregi
Questa tecnica, nell’ipotesi che sia usata da sola, cioè senza combinarla col push-steering:
- funziona sia a moto dritta che a moto inclinata
- consente ampi cambiamenti di direzione
- funziona anche senza mani.
3.3.3 Difetti
Questa tecnica:
- è più lenta e meno precisa del push-steering, specialmente nella guida veloce e nelle curve strette
- è assai meno efficace sulle moto pesanti, dove il peso del pilota perde importanza rispetto al peso totale.
3.3.4 Quando si usa
Al di fuori del caso della guida senza mani, lo spostamento del peso è in realtà sempre abbinato all’uso dello sterzo e il bello è che lo migliora in qualsiasi circostanza, perché:
- aiuta a mantenere l’equilibrio nelle manovre a bassissima velocità
- rende più rapida la sterzata, specialmente su moto dallo sterzo pesante, perché
- minimizza il rischio di grattare qualche cosa a terra nella guida veloce, perché consente una minor inclinazione della moto a parità di velocità e di raggio della traiettoria
- dona piacevolezza alla guida, in quanto il pilota percepisce che la moto mantiene la traiettoria curva senza dover agire sullo sterzo.
Insomma, l’accoppiata push-steering + spostamento del peso è vantaggiosa in tutte le circostanze della guida e specialmente nella guida veloce.
[1] In realtà la forza centrifuga è solo una forza apparente (https://it.wikipedia.org/wiki/Forza_centrifuga), ma è un concetto comodo da usare. ⇑
[2] L’effetto si manifesta anche sulla ruota posteriore, che però non ha la libertà di sterzare e scarica tale tendenza sul forcellone. ⇑
[3] Per definire il push-steering si usa spesso il termine “controsterzo”, che in realtà è la manovra con cui si recupera una sbandata del retrotreno con una sterzata in senso contrario rispetto alla curva. Nel nostro caso non c’è alcuna sbandata da recuperare, per cui il termine è improprio. ⇑
[4] Qui cade in errore perfino l’Ing. Vittore Cossalter, secondo il quale il pilota prima sterza in senso contrario e poi, una volta che la moto si inclina dalla parte giusta, gira lentamente lo sterzo nella direzione della curva (Motorcycle Dynamics edizione italiana, seconda edizione 2014, par. 8.5 e 8.6 pag. 301 e 303). ⇑
Dai un’occhiata ai nostri Corsi di Guida Sicura, ai nostri Tour in Moto e ai nostri Tour in Miata!
Manca alla trattazione il caso in cui si curva leggermente alzati dalla sella con la moto inclinata all’interno della curva e il corpo dritto in verticale, per intenderci l’opposto della piega classica per quanto riguarda la posizione del corpo. Mi piacerebbe conoscere pregi e difetti.
GRAZIE
Per capire il limite di geometria, sospensioni, pneumatici e pilota, usualmente piego senza sporgermi fino a che non sento cominciare a slittare la ruota posteriore.
È così che capisco il limite del pacchetto di cui sono parte.
Quando voglio divertirmi facendo ginnastica porto il sedere indietro, mi stendo sul serbatoio, scendo con la testa verso lo specchietto e così in dinamica si aumenta il carico in sull’anteriore (dove l’avancorsa si muove per la compressione delle forcelle data dalla forza centrifuga) col beneficio del baricentro che fa inclinare di meno la moto e si chiama baciare lo specchietto.
Mi raccomando tutto questo in punta di piedi sulle pedane (ecco lo spingere sulle pedane) e questa è la postura e il movimento perfetto per il gran piegone da vecchio smanettone.
Finalmente un vero Trattato su un argomento caro a noi riders. In moto, saper affrontare bene una curva è tutto! Grazie all’Autore, che già ha manifestato la sua attenzione e la sua competenza verso questi aspetti che fanno la differenza fra un rider ed un parvenurider!
Sono felice di aver letto un articolo così ben argomentato e sviluppato con un linguaggio chiaro e intuibile subito da parte di tutti
Cosa sottolineo non facile in quanto si trattano temi molto tecnici
Veramente bravo e professionale l’autore che ha fatto molta chiarezza su aspetti che sembrano noti e ovvi ma che in realtà non lo sono
Grande Wotan!
Grazie come sempre.
Come sempre, sei stato chiarissimo nello spiegare l’argomento. Argomento che avevo avuto la fortuna di sentire in occasione del corso fatto con te e che consiglio a tutti.
Grazie Claudio.
Un articolo davvero ben fatto e, soprattutto, utilissimo. Mi piacerebbe che ne seguissero altri e che l’argomento curve non venisse esaurito con la preannunciata seconda parte relativa alle variazioni di velocità – che spero esca a breve – ma c’è ne fosse anche una terza dedicata alle traiettorie.
Complimenti sinceri all’Autore!
Nell’articolo Claudio, grazie mille. Il modo in cui è scritto, le immagini ed i video rendono tutto chiaro ed intuitivo. Bisogna poi lavorare in sella! Grazie.
Grazie, Claudio, sei straordinario. Efficacissima e oltremodo chiara questa tua lezione.
Saferiders mi ha donato un altro piacere di andare in moto, quello di una guida consapevole.
Mille grazie!!!
complimenti Claudio, è interessante e ben fatto come le tue lezioni dal vivo. Davvero prezioso. A presto !
Letto tutto di un fiato. Articolo davvero molto interessante e che dà tanta più consapevolezza ai gesti istintivi che ogni giorno facciamo guidando una moto.
Come sempre una garanzia, davvero ben fatto!
Leggo sempre con molto interesse i tuoi articoli e sono sempre molto utili.
Ai ragione quando dici che sul web gira veramente di tutto ho visto anche il video dove c’è quello che dice non so perché succede prendetelo come un dogma.